SKFMA-14型 网络型模块式工业机器人生产線(xiàn)实训系统
所属类别:智能(néng)制造系列
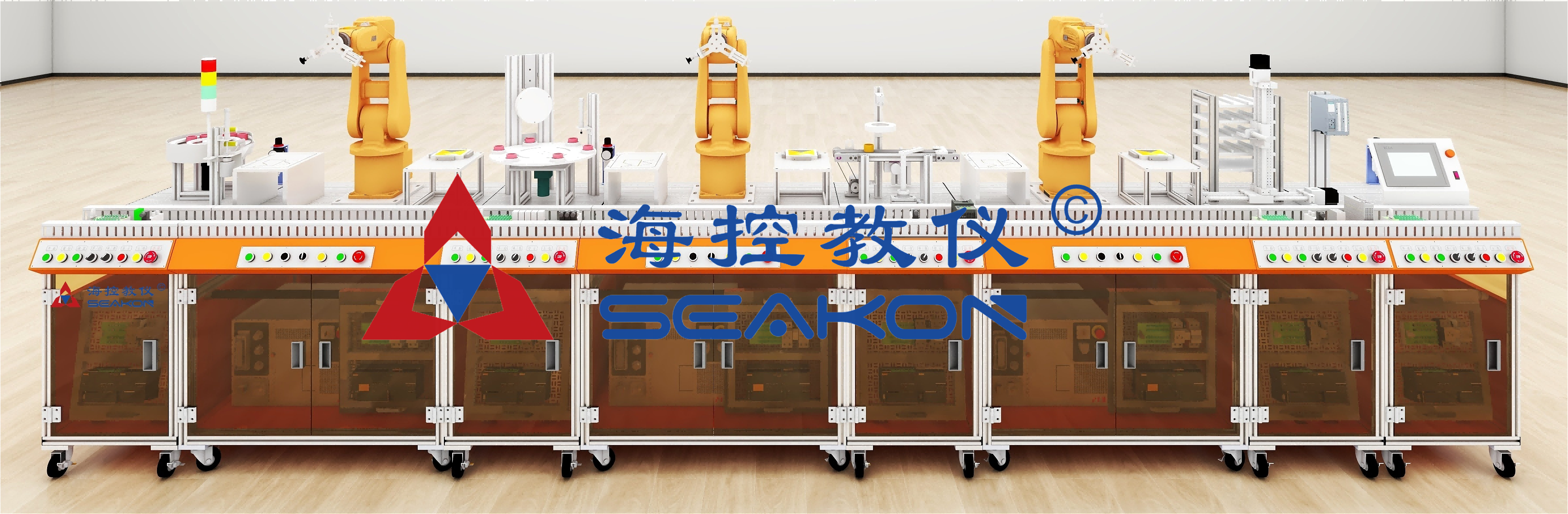
·设备外观
·设计简述
实训系统由8个站组成。分(fēn)别為(wèi):上料站、机器人搬运站、加工站、机器人分(fēn)拣检测站、传送分(fēn)拣站、安装站、机器人装配检测站和分(fēn)类站,配有(yǒu)机器人基础实训模块(如搬运,码垛,轨迹,七巧板),配有(yǒu)视觉检测系统。控制系统可(kě)以选用(yòng)西门子或三菱PLC进行控制,工业机器人可(kě)选用(yòng)ABB等其他(tā)品牌,可(kě)以完成机器人基础实训,也可(kě)以完成基于机器人、视觉、网络控制等综合性智能(néng)制造产線(xiàn)模拟实训。
·主要参数
1、工作電(diàn)源:单相三線(xiàn)AC220V±10% 50Hz2、工作环境:温度-10℃~40℃ 相对湿度≤85%(25℃)海拔<4000m
3、装置容量:≤4.0KVA
4、整机尺寸:5000mm×1700mm×1400mm;常规站单机:约460mm×860mm×1400mm;机器人站单机尺寸:约900mm×860mm×1600mm;
5、安全保护:具有(yǒu)漏電(diàn)压、漏電(diàn)流保护,安全符合國(guó)家标准。
·组成及功能(néng)
(一)上料站由料斗、回转台、导料机构、工件滑道、提升装置、检测工件和颜色识别光電(diàn)开关、开关電(diàn)源、可(kě)编程序控制器、按钮、I/O接口板、通讯接口板、電(diàn)气网孔板、直流减速電(diàn)机、電(diàn)磁阀及气缸组成,主要完成将工件从回传上料台依次送到检测工位,提升装置将工件提升并检测工件颜色。
1、料斗:用(yòng)于存放物(wù)料。
2、回转台:带动物(wù)料转动
3、导料机构:使物(wù)料在回转台上能(néng)按照设定好的方向旋转,输送工件。
4、工件滑道:使物(wù)料下滑到物(wù)料台上。
5、直流减速電(diàn)机:用(yòng)于驱动回转台转动,通过导料机构输送工件。
6、光電(diàn)传感器1:输送台上工件的颜色检测、物(wù)料检测為(wèi)光電(diàn)漫反射型传感器,工件库中有(yǒu)物(wù)料时為(wèi)PLC提供一个输入信号。
7、光電(diàn)传感器2:检测物(wù)料到达等待抓取位。
8、磁性传感器:用(yòng)于气缸的位置检测。当检测到气缸准确到位后将给PLC发出一个到位信号。(磁性传感器接線(xiàn)时注意蓝色接“-”,棕色接“PLC输入端”)。
9、单杆气缸:由单向气动電(diàn)控阀控制。当气动電(diàn)磁阀得電(diàn),气缸伸出,同时将物(wù)料送至直線(xiàn)移动装置上。
10、警示灯:系统上電(diàn)、运行、停止信号指示。
11、安装支架:用(yòng)于安装提升气缸及各个检测传感器。
12、控制按钮板:用(yòng)于系统的基本操作、单机控制、联机控制。
13、電(diàn)气网孔板:主要安装PLC主机模块、空气开关、开关電(diàn)源、I/O接口板、各种接線(xiàn)端子等。
(二)机器人搬运工作站
由ABB工业机器人、气动手指、磁性传感器、机器人基础实训模块、开关電(diàn)源、可(kě)编程序控制器、按钮、I/O接口板、通讯接口板、電(diàn)气网孔板、多(duō)种类型電(diàn)磁阀组成。主要完成将工件从上站搬运到加工站待料區(qū)工位。
1、ABB工业机器人:主要完成物(wù)料的搬运工作。
2、开关電(diàn)源:完成整个系统的供電(diàn)任務(wù)。
3、I/O接口板:完成PLC信号与传感器、電(diàn)磁信号、按钮之间的转接。
4、控制按钮板:用(yòng)于系统的基本操作、单机控制、联机控制。
5、安装支架:用(yòng)于安装提升气缸及各个检测传感器。
6、電(diàn)气网孔板:主要安装PLC主机模块、空气开关、开关電(diàn)源、I/O接口板、各种接線(xiàn)端子等。
7、机器人基础实训模块:主要有(yǒu)七巧板模块、轨迹模块等组成,可(kě)以完成搬运码垛、轨迹等功能(néng)。
(三)加工站
由6工位旋转工作台、平面推力轴承、直流减速電(diàn)机(5r/m)、刀(dāo)具库(3种刀(dāo)具)、升降式加工系统、加工组件、检测组件、光電(diàn)传感器、转台到位传感器、步进電(diàn)机(步距角1、2°)、步进電(diàn)机驱动器、電(diàn)气网孔板等组成。主要完成物(wù)料加工和深度的检测。
(四)机器人分(fēn)拣检测站
由工业机器人,電(diàn)磁阀组,接線(xiàn)端口、 西门子 PLC S7-200 SMART CPU SR30(18 路 DI/12 路 DO)、机器人基础实训模块、急停按钮和启动/停止按钮、单机和联网转换开关、运行指示灯、 实训桌、 接線(xiàn)端口、 模数化插座等组成。主要完成把加工站加工完毕的工件搬运到输送检测站,等待输送站把工件输送到装配站装配结束后把工件输送到搬运分(fēn)拣站, 然后回到初始位置时,再把工件搬运到输送站。
1、工业机器人:采用(yòng)ABB IRB1100 。重复定位精度±0.01mm, 并配备配套的工业机器人示教器和控制器,用(yòng)于完成工件的搬运。
2、真空吸盘:用(yòng)于工件的吸取。
3、電(diàn)磁阀:用(yòng)于控制真空发生器,控制吸盘的吸取。
4、机器人基础实训模块:主要有(yǒu)七巧板模块、轨迹模块等组成,可(kě)以完成搬运码垛、轨迹等功能(néng)。
(五)传送分(fēn)拣站
由直線(xiàn)皮带输送線(xiàn)、分(fēn)拣料槽、旋转气缸、变频器、三相交流减速電(diàn)机、光電(diàn)传感器、视觉系统、電(diàn)磁阀、开关電(diàn)源、按钮、I/O接口板、通讯接口板、電(diàn)气网孔板等组成,主要完成将材料颜色不合格的工件分(fēn)拣出来,同时将合格产品传送至下一站。
1、直線(xiàn)皮带输送線(xiàn):主要完成将物(wù)料输送到相应的位置
2、分(fēn)拣料槽:完成将材料颜色不合格的工件分(fēn)拣出来
3、旋转气缸:将物(wù)料导入料槽,由单向電(diàn)控气阀控制。
4、变频器:控制交流電(diàn)机,实现变频调速。
5、三相交流减速電(diàn)机:驱动传送带转动,由变频器控制。
6、光電(diàn)传感器:当有(yǒu)物(wù)料到放入时,给PLC一个输入信号。(接線(xiàn)注意棕色接“+”、蓝色接“-”、黑色接输出)。
7、光電(diàn)传感器:检测上一站的物(wù)料。
8、视觉系统:物(wù)料经过时检测物(wù)料的颜色。
(六)安装站
由吸盘机械手、摇臂部件、旋转气缸、料仓换位部件、工件推出部件、真空发生器、开关電(diàn)源、可(kě)编程序控制器、按钮、I/O接口板、通讯接口板、電(diàn)气网孔板、多(duō)种类型電(diàn)磁阀及气缸组成,主要完成选择要安装工件的料仓,将工件从料仓中推出,将工件安装到位。
1、吸盘机械手:用(yòng)于真空原理(lǐ)吸取物(wù)料。
2、摇臂部件:带动吸盘机械手前后摆动。
3、旋转气缸:摇臂部件的执行机构。
4、料仓换位部件:用(yòng)于黑白工件的选择。
5、工件推出部件:将黑白工件推出。
6、磁性传感器:用(yòng)于气缸的位置检测。当检测到气缸准确到位后将给PLC发出一个到位信号。(磁性传感器接線(xiàn)时注意蓝色接“-”,棕色接“PLC输入端”)。
7、单杆气缸1:由单向气动電(diàn)控阀控制。当气动電(diàn)控阀得電(diàn),气缸伸出,进行料仓换位。
8、单杆气缸2:由单向气动電(diàn)控阀控制。当气动電(diàn)控阀得電(diàn),气缸伸出,将黑白小(xiǎo)工件推出。
9、安装支架:用(yòng)于安装提升气缸及各个检测传感器。
10、控制按钮板:用(yòng)于系统的基本操作、单机控制、联机控制。
11、電(diàn)气网孔板:主要安装PLC主机模块、空气开关、开关電(diàn)源、I/O接口板、各种接線(xiàn)端子等。
(七)工业机器人装配检测站
由ABB工业机器人、开关電(diàn)源、机器人基础实训模块、可(kě)编程序控制器、按钮、I/O接口板、通讯接口板、電(diàn)气网孔板、多(duō)种类型電(diàn)磁阀及气缸组成,主要完成将上站工件拿(ná)起放入安装平台,等待安装站将小(xiǎo)工件安装到位后,将装好工件拿(ná)起放下站。
1、電(diàn)磁阀组:控制手爪以及吸盘。
2、磁性传感器:用(yòng)于气缸的位置检测。当检测到气缸准确到位后将给PLC发出一个到位信号。(磁性传感器接線(xiàn)时注意蓝色接“-”,棕色接“PLC输入端”)。
3、控制按钮板:用(yòng)于系统的基本操作、单机控制、联机控制。
4、電(diàn)气网孔板:主要安装PLC主机模块、空气开关、开关電(diàn)源、I/O接口板、各种接線(xiàn)端子等。
5、机器人基础实训模块:主要有(yǒu)七巧板模块、轨迹模块等组成,可(kě)以完成搬运码垛、轨迹等功能(néng)。
(八)分(fēn)类站
由二维丝杆运动机构、气动推出机构、分(fēn)类料仓、步进電(diàn)机、步进驱动器、電(diàn)感传感器、开关電(diàn)源、可(kě)编程序控制器、按钮、I/O接口板、通讯接口板、電(diàn)气网孔板、多(duō)种类型電(diàn)磁阀及气缸组成,主要完成按工件类型分(fēn)类,将工件推入料仓。
(九)总控站
控制台主要由S7-1511C主机:CPU 1511C-1 PN, 175 KB程序,1 MB数据;60 ns;集成2x PN接口;集成 16 DI/16 DO, 5 AI/2 AO, 6 HSC@100kHz,S7-1200/1500 4M 存储卡。二位选择开关、启动和停止开关、急停开关、复位开关、10.2英寸MCGSTPC1061TI工业彩色触摸屏、電(diàn)气网孔板等组成,主要完成监视各分(fēn)站的工作状态并协调各站运行,完成工业控制网络的集成。
(十)配套附件
1、加工工件组:包括大工件(三种)、小(xiǎo)工件(两种)。工件组可(kě)多(duō)次组装及拆卸。
2、提供实训指导书及软件使用(yòng)说明书、提供设备電(diàn)路原理(lǐ)图等必要资料。
3、配套工具:内六角扳手、万用(yòng)表、尖嘴钳,一字起子、十字起子、電(diàn)铬铁等。
4、空气压缩机及连接气管等。
5、配套一台電(diàn)脑桌,尺寸600mm×560mm×1000mm。
·实训项目
1、了解传感器的应用(yòng)2、观察气动元件的应用(yòng)
3、掌握PLC控制技术
网络型模块式工业机器人实训系统八个工作站各自都有(yǒu)一套控制系统,可(kě)分(fēn)成八个完全独立的工作站进行实训,机器人站同时可(kě)完成机器人基础实训(搬运码垛,轨迹,七巧板),在对各站生产工艺和電(diàn)气控制系统的构成熟悉后,通过PLC和机器人编程可(kě)完成以下任務(wù):
(1)系统故障检测
(2)工件上料程序控制
(3)工件搬运程序控制
(4)工件加工程序控制
(5)工件分(fēn)拣程序控制
(6)工件检测输送程序控制
(7)工件装配程序控制
(8)工业机器人装配检测程序控制
(9)仓储程序控制
(10)基于智能(néng)制造的网络控制
(11)步进電(diàn)机驱动控制
(12)机器人搬运控制
(13)视觉识别控制
(14)变频调速控制
(15)传输带控制
4、電(diàn)气控制系统安装调试
5、机器人基础实训
(1)机器人安全操作规范
(2)示教器认知
(3)控制器认知
(4)机器人本體(tǐ)认知
(5)示教器画面与基本操作
(6)运动模式调节
(7)机器人伺服電(diàn)机上電(diàn)
(8)坐(zuò)标系切换
(9)机器人运行速度调节
(10)机器人单轴运动
(11)机器人線(xiàn)性运动
(12)异常及故障处理(lǐ)技术
(13)机器人维护与保养
(14)机器人程序备份与加载
6、机械系统安装调试
7、電(diàn)机驱动调试
8、系统维护和故障检测技术
