SKIMA-54型 工业机器人与机床协同作业实训平台
所属类别:智能(néng)制造系列
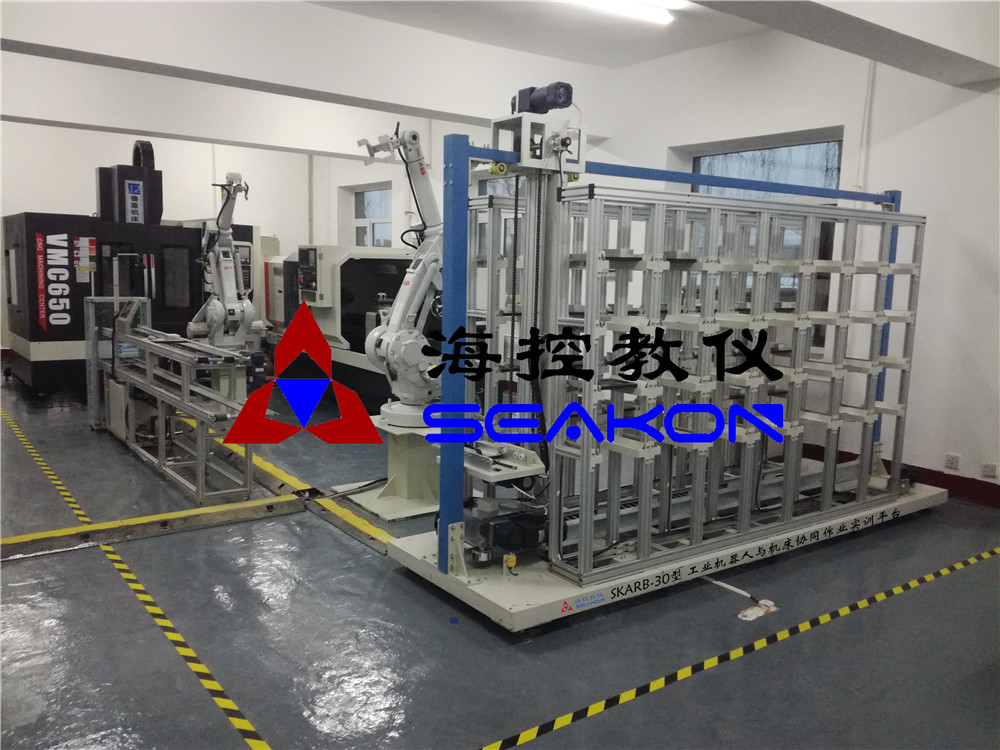
·设备外观
·设计简述
实训平台涉及企业工厂的生产物(wù)流管理(lǐ)和人机互动在工业生产过程中的应用(yòng),同时结合企业生产物(wù)流运营模式,进行综合且专业化的设计,以实训平台和“互联网+”模式為(wèi)研究载體(tǐ),构建一个高端精细化实體(tǐ)制造企业运作模式的实验室。实训平台主要由立體(tǐ)仓库(原材料/成品)、仓储机器人、加工中心单元、数控車(chē)床单元、输送線(xiàn)、加工中心上下料机器人、PLC控制单元、视觉检测单元等组成。适合高等院校、职业院校、技工學(xué)校等机器人工程、工业机器人技术、机電(diàn)技术应用(yòng)(工业机器人方向)、工业机器人技术应用(yòng)、工业机器人应用(yòng)与维护等相关专业的《机器人与控制技术》、《运动控制》、《自动化技术》等课程实训教學(xué)。·主要参数
1.工作電(diàn)源:三相四線(xiàn)AC380V ±10% 50HZ;2.工作环境:温度-5ºC~+40ºC;湿度 85%(25ºC);海拔<4000m;
3.气源压力:0.4~0.6MPa;
4.装置容量:10KW;
5.外形尺寸:≥10000mm*7000mm*2000mm;
6.安全保护:具有(yǒu)接地、漏電(diàn)压、漏電(diàn)流保护,安全指标符合國(guó)家标准。
·组成及功能(néng)
实训平台主要由成品立體(tǐ)仓库、仓储机器人、加工中心单元、数控車(chē)床单元、输送線(xiàn)、加工中心上下料机器人、视觉检测单元、電(diàn)气控制柜、机器人底座等组成。(一)立體(tǐ)仓库
主要由立體(tǐ)仓库、码垛机、仓储机器人及電(diàn)气控制系统组成。
1.立體(tǐ)仓库
立體(tǐ)仓库采用(yòng)工业标准型材和钢板加工而成,外表面亚光密喷塑,每个有(yǒu)4层7列28个仓位,两个仓库共有(yǒu)56个仓位,仓位都安装有(yǒu)检测装置,检测仓位状态。仓库尺寸:3000mm*600mm*2000mm;空位检测开关,原材料立體(tǐ)仓库和成品立體(tǐ)仓库布局在堆垛机两边,即两个仓库共用(yòng)一套堆垛机。
2.堆垛机
堆垛机主要由行走机构、升降机构、货叉伸缩机构、電(diàn)气控制系统及安全装置等机构组成,与立體(tǐ)仓库固定在一起。水平方向在铺设的地轨上运行,采用(yòng)交流蜗杆减速机且带刹車(chē)功能(néng),安装有(yǒu)高精度旋转编码器,使机器具有(yǒu)一定的自锁性和精确定位性;垂直方向采用(yòng)链传动机构,由工业链条、链轮、滑道及電(diàn)机组成,采用(yòng)交流减速電(diàn)机且带刹車(chē)功能(néng),安装有(yǒu)高精度编码器。货叉伸缩机构采用(yòng)工业链条、交流减速電(diàn)机及链传动机构,货叉可(kě)以前伸,也可(kě)以后缩,具有(yǒu)位置传感器进行定位控制。所有(yǒu)電(diàn)机均采用(yòng)变频传动方式,控制堆垛机平稳运行。
3.搬运、码垛机器人(下料机器人参数相同)
机器人负载≥5KG,附加载荷≥18KG,工作半径≥1440mm,工作范围轴轴1+170°~-170° 速度120°/s轴2+70°~-70°速度120°/s轴3+70°~-65速度120°/s轴4+150°~-150° 速度280°/s轴5+115°~-115°速度280°/s轴6+300°~-300°速度280°/s;TCP最大速度不低于2.1m/s,重复定位精度≤0.05mm((ISO试验平均值);集成12路信号源,气源压力≤8bar,落地安装,本體(tǐ)重量225KG。
4.机器人控制器
IRC5是ABB第五代机器人控制器,采用(yòng)RAPID工业机器人编程语言;内置数字量16DI/16DO;可(kě)扩展電(diàn)子限位开关、5路安全输出(1-7轴监测)等安全选项;提供SafeMove功能(néng),可(kě)实现静态、速度、位置、方向监测(机器人及附加轴)和至少8路功能(néng)启动安全输入和8路监测输出;支持DeviceNet、PROFINET、PROFIBUS DP、Etherent/IP协议;電(diàn)源電(diàn)压三相200-600V,频率50Hz-60Hz;工作环境温度范围0℃~ +45℃;工作环境相对湿度最高95%(无凝露)。
5.机器人示教器
采用(yòng)图形化彩色触摸屏,触摸屏不小(xiǎo)于6.5寸,至少有(yǒu)10个薄膜键盘、1个急停按钮,功能(néng)可(kě)自定义;配备操纵杆,可(kě)控制多(duō)个轴运动;能(néng)够进行热插拔,运行时可(kě)插拔;支持和机器人本體(tǐ)配套,示教盒控制電(diàn)路的主要功能(néng)是对操作键进行扫描并将按键信息送至控制器,同时将控制器产生的各种信息在显示屏上进行显示。
6.传送带单元
主體(tǐ)框架采用(yòng)工业标准4040型材拼装而成,输送带采用(yòng)PVC材质,选用(yòng)高强力优质全棉、尼龙、聚酯帆布作带芯,输送線(xiàn)设有(yǒu)定位装置,实现定位加工、搬运、检测操作,整个输送装置采用(yòng)交流变频调速,输送線(xiàn)采用(yòng)上下两层结构,托盘可(kě)以从底层输送線(xiàn)回流进行回收,可(kě)以实时控制输送線(xiàn)的速度,调节输送节奏,外形尺寸:2730mm*460mm*890mm。
(二)加工中心加工单元
由数控加工中心实物(wù)、自动门装置、气动定位夹具组成。主要完成将原材料进行实物(wù)精细加工,加工成设定形状的工件。由机器人进行上下料,自动开关门,自动运行加工程序。
(三)車(chē)床加工单元
由数控車(chē)床实物(wù)、自动门装置、气动定位夹具组成。主要完成将原材料进行实物(wù)加工,加工成设定形状的工件。由机器人进行上下料,和机器人之间进行通讯,自动开关门,自动运行加工程序。
(四)PLC控制单元
由控制柜、電(diàn)气安装网孔板、工业触摸屏、可(kě)编程控制器、空气开关、开关電(diàn)源、接線(xiàn)端子等组成。根据系统下单情况,合理(lǐ)的输送原材料。
控制柜采用(yòng)优质钢板做骨架,经过机械加工成型,外表面亚光密喷塑,整机既坚固耐用(yòng),又(yòu)美观大方。柜子的底部采用(yòng)带刹車(chē)的万向轮,移动和固定两相宜,方便调整设备的摆放位置。控制柜内部安装有(yǒu)一块多(duō)功能(néng)网孔板,主體(tǐ)采用(yòng)1.5mm厚的钢板加工成型,网孔采用(yòng)“横二竖六”椭圆長(cháng)孔加工工艺,整體(tǐ)设计规范、合理(lǐ),使各类元器件在任何角度、任何方位都能(néng)轻松装配、调整。
采用(yòng)西门子高性价比小(xiǎo)型PLC产品S7-200 Smart CPU SR30,供電(diàn)電(diàn)压AC85~264V,集成18路数字量输入(DC24V 4mA,漏型・源型可(kě)切换)/12路数字量输出(继電(diàn)器输出),内置18KB程序存储器、12KB数据存储器、10KB保持性存储器、6个高速计数器(最大200KHz),集成RS485接口、以太网接口,支持RS232、RS485、MODBUS、USS、自由口通讯、S7协议通讯、PROFIBUS等通信,配有(yǒu)通信编程電(diàn)缆,配备两套CPU SR30模块,共有(yǒu)72路数字量信号输入/48路数字量输出。
触摸屏采用(yòng)昆仑通态MCGS TPC1061Ti,供電(diàn)電(diàn)压24±20%VDC,Cortex-A8 CPU,主频600MHz,内存128M;10英寸高亮度TFT液晶显示屏(分(fēn)辨率1024*600),四線(xiàn)電(diàn)阻式触摸屏(分(fēn)辨率4096*4096);集成以太网接口、RS232、RS485、USB接口,可(kě)扩展CAN总線(xiàn)接口,产品经CE/FCC认证,防护等级IP65,预装MCGS嵌入式组态软件(运行版),具备强大的图像显示和数据处理(lǐ)功能(néng)。
(五)视觉检测单元
视觉检测采用(yòng)CCD拍照检测,有(yǒu)效像素数30万,摄像面积4.8mm*3.6mm,彩色检测,场景数 128 个,可(kě)利用(yòng)流程编辑功能(néng)制作处理(lǐ)流程,支持串行 RS-232C 和网络 Ethernet 通讯,提供高速输入1点、高速输出4点、通用(yòng)输入 9点和通用(yòng)输出23点的并行通信,提供 DVI-I 监控输出,提供环形光源,内圆直径 40mm,外圆直径 70mm,供電(diàn)電(diàn)压 24V,供電(diàn)電(diàn)流 440mA。
智能(néng)视觉检测系统采用(yòng)CCD照相机将被检测的目标转换成图像信号,传送给专用(yòng)的图像处理(lǐ)系统,根据像素分(fēn)布和亮度、颜色等信息,转变成数字化信号,图像处理(lǐ)系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、長(cháng)度,再根据预设的允许度和其他(tā)条件输出结果,包括尺寸、角度、个数、合格/不合格、有(yǒu)/无等,实现自动识别功能(néng)。通过I/O電(diàn)缆连接到PLC或机器人控制器,也支持串行总線(xiàn)和以太网总線(xiàn)连接到PLC或机器人控制器,对检测结果和检测数据进行传输。
(六)气动系统
气动系统主要由空气压缩机、气源处理(lǐ)件、气动控制系统、气动执行机构、气动附件组成。
采用(yòng)奥突斯空气压缩机,供電(diàn)電(diàn)压AC220V,功率550W,工作压力0.2-0.8MPa可(kě)调。
(七)電(diàn)脑桌
主體(tǐ)部分(fēn)采用(yòng)工业标准铝型材(规格30*30)组装而成,封板采用(yòng)1.5mm冷轧钢板喷塑处理(lǐ);
桌面上方设置有(yǒu)显示器围栏,采用(yòng)1.5mm冷轧钢板冲φ6.5mm工艺孔,既美观又(yòu)实用(yòng),防止显示器坠落;
键盘架采用(yòng)ABS塑料一次性压制而成,个性化圆角R设计避免撞伤,带有(yǒu)储物(wù)筆(bǐ)盒,通过加重型轴承导轨吊装在桌面板下方,抽出缩回自如,尺寸480mm*230mm*40mm。
桌體(tǐ)配有(yǒu)4个带刹車(chē)万向轮,方便電(diàn)脑桌移动和固定。2寸双轴承结构,直径50mm,轮宽25mm,高度75mm,螺杆M10*25。
尺寸:600mm*560mm*1000mm(桌面离地800mm)。
·实训项目
(一)数控操作类实训1.数控系统的启动和初始化
2.数控系统的参数设置与调整
3.变频器的调试、参数设置与应用(yòng)
4.进给驱动单元的调试与应用(yòng)
5.伺服主轴控制应用(yòng)
6.机床参考点的调试
7.電(diàn)动刀(dāo)架控制
8.数控系统的通讯;
9.数控車(chē)床電(diàn)气系统的设计
10.数控車(chē)床故障诊断与维修
11.数控系统的操作与编程
12.車(chē)床功能(néng)参数设置
13.加工中心功能(néng)参数设置
14.全数字交流伺服電(diàn)机运行与故障诊断
15.加工中心手持脉冲发生器调试
16.加工中心气动基本回路原理(lǐ)及分(fēn)析
17.加工中心刀(dāo)库的原理(lǐ)和应用(yòng)
18.加工中心PLC编程及逻辑控制
19.加工中心数据备份和恢复
20.加工中心典型故障设置及排除
21.加工中心编程操作与实體(tǐ)加工
22.数控車(chē)床编程操作与实體(tǐ)加工
(二)机器人系统入门类实训
1.机器人主要技术参数
2.机器人安全系统
3.机器人安全操作规范
4.示教器认知
5.控制器认知
6.机器人本體(tǐ)认知
7.示教器画面与基本操作
8.运动模式调节
9.机器人伺服電(diàn)机上電(diàn)
10.坐(zuò)标系切换
11.机器人运行速度调节
12.机器人单轴运动
13.机器人線(xiàn)性运动
14.机器人编程语言与构架
15.异常及故障处理(lǐ)技术
16.机器人维护与保养
17.机器人程序备份与加载
(三)机器人系统设置类实训
1.工具坐(zuò)标系标定原理(lǐ)和方法
2.工件/用(yòng)户坐(zuò)标系标定原理(lǐ)和方法
3.机器人I/O硬件及组成
4.机器人通信分(fēn)类与方式
5.机器人I/O配置
6.机器人零点校准
7.机器人常用(yòng)指令
8.机器人程序建立
9.机器人指令添加与编辑
10.机器人运动轨迹规划
11.机器人程序执行与测试
12.机器人自动运行
13.机器人外部启动
(四)PLC编程及应用(yòng)
1.PLC认知及选型
2.PLC電(diàn)气设计与配置
3.PLC编程与实训
4.PLC位置控制電(diàn)气设计
5.变频系统认知
6.变频系统電(diàn)气设计
7.变频系统参数设置
8.PLC变频控制编程与实训
9.触摸屏认知与选型
10.触摸屏通讯電(diàn)缆制作
11.触摸屏组态软件实训
12.触摸屏网络配置与组态
13.PLC与触摸屏通讯实训
14.PLC与机器人控制電(diàn)气系统设计
15.PLC对机器人外部控制系统配置及编程
16.PLC综合应用(yòng)编程实例
(五)基于PC的工业视觉系统实训
1.工业相机基本原理(lǐ)与结构
2.工业相机分(fēn)类
3.基于PC的视觉系统硬件搭建
4.光源安装与调整
5.工业相机图像识别项目应用(yòng)
(六)智能(néng)工业相机应用(yòng)实训
1.智能(néng)工业相机系统构建
2.智能(néng)工业相机工程建立与测试
3.智能(néng)工业相机通讯配置及应用(yòng)
4.智能(néng)工业相机检测案例应用(yòng)
(七)机床协调作业综合控制
1.机器人与加工中心协调作业控制
2.机器人与車(chē)床协调作业控制
3.机器人与工业相机协调作业控制
4.自动输送線(xiàn)上料控制
5.自动输送線(xiàn)托盘回流控制
6.堆垛机出入库控制
7.PLC、机器人及机床联动运行
