SKDRB-13型 五自由度机器人实训模型
所属类别:机器人系列
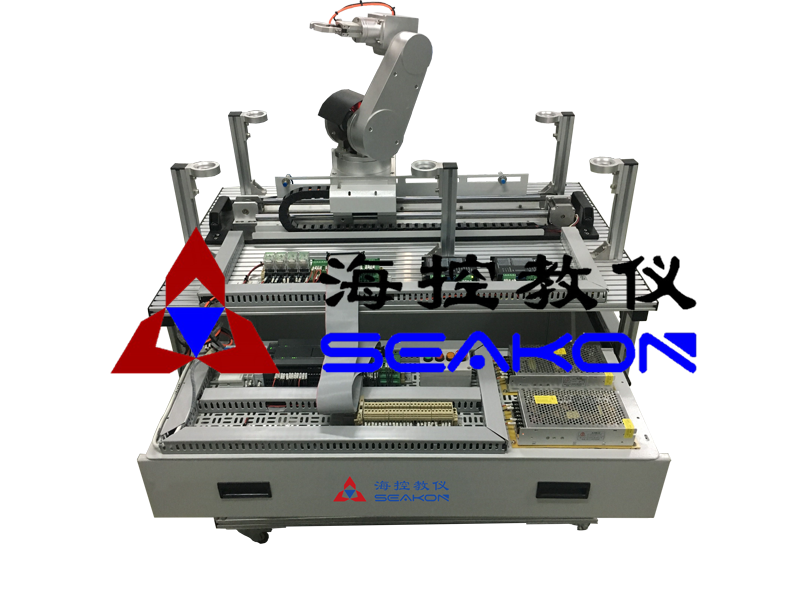
·设备外观
·设计简述
实训模型集五自由度机器人、電(diàn)气控制、网孔板、型材实训桌于一體(tǐ)。通过PLC、对五自由度机器人进行控制,实现对机器人在行程范围内任一位置物(wù)體(tǐ)的抓取、移动、存放功能(néng)。实训模型采用(yòng)型材桌及伸缩式网孔板抽屉结构,全开放式布局,可(kě)充分(fēn)锻炼學(xué)生对机器人的认识、拆装、接線(xiàn)、编程和调试能(néng)力。适合高等院校、职业院校、技工學(xué)校等机器人工程、工业机器人技术、机電(diàn)技术应用(yòng)(工业机器人方向)、工业机器人技术应用(yòng)、工业机器人应用(yòng)与维护等相关专业的《机器人与控制技术》、《运动控制》、《自动化技术》等课程实训教學(xué)。·主要参数
1.工作電(diàn)源:单相三線(xiàn)AC220V±10% 50Hz;2.工作环境:温度-10℃~+40℃相对湿度≤85%(25℃)海拔<4000m;
3.装置容量:<0.5kVA;
4.外形尺寸:1000mm*720mm*1400mm;
5.安全保护:具有(yǒu)接地、漏電(diàn)压、漏電(diàn)流保护,安全指标符合國(guó)家标准。
·组成及功能(néng)
1.实训模型型材由实训台、五自由度机器人及電(diàn)气控制三部分(fēn)组成。五自由度机器人运动机械部分(fēn)包括底座水平移动、底座旋转、大臂上下摆动、小(xiǎo)臂上下摆动、手爪旋转,用(yòng)于实现定位功能(néng),手爪夹紧与松开,手爪可(kě)选择電(diàn)动手爪或者气动手爪,齿轮传动,开闭角度自由控制,可(kě)对直径60mm以内的任意物(wù)體(tǐ)进行抓取,具有(yǒu)力矩保持、速度可(kě)调等特点。桌面设有(yǒu)六个工位台,在教學(xué)过程中可(kě)根据考核要求,调节工作台位置点。2.電(diàn)气控制部分(fēn)包含漏電(diàn)保护器、PLC、机器人控制器、步进電(diàn)机及驱动器、空心杯電(diàn)机、直流减速電(diàn)机、蜗轮蜗杆、手爪、電(diàn)感传感器、霍尔传感器、开关電(diàn)源、操作盒(黄、绿、红及急停控制按钮)等组成,其中PLC(三菱采用(yòng)FX3GA-24MT-CM/ES-A或者SMART ST30),通过传感器信号采集,PLC编程对五自由度机器人进行位置控制、时序逻辑控制,实现对机器人在工作台面范围内物(wù)體(tǐ)抓取、移动、放置的功能(néng)。
3.五自由度机器人主要技术指标:
机器人负载≥1KG,工作半径≥400mm,工作范围轴轴1水平移动 速度300m/s轴2 340°速度60°/s轴3 135°速度120°/s轴4 320°速度60°/s轴5 360°速度180°/s;重复定位精度≤0.05mm;气源压力≤5bar,基座安装,本體(tǐ)重量≤30KG。
4.電(diàn)脑桌
主體(tǐ)部分(fēn)采用(yòng)工业标准铝型材(规格30*30)组装而成,封板采用(yòng)1.5mm冷轧钢板喷塑处理(lǐ);
桌面上方设置有(yǒu)显示器围栏,采用(yòng)1.5mm冷轧钢板冲φ6.5mm工艺孔,既美观又(yòu)实用(yòng),防止显示器坠落;
键盘架采用(yòng)ABS塑料一次性压制而成,个性化圆角R设计避免撞伤,带有(yǒu)储物(wù)筆(bǐ)盒,通过加重型轴承导轨吊装在桌面板下方,抽出缩回自如,尺寸480mm*230mm*40mm。
桌體(tǐ)配有(yǒu)4个带刹車(chē)万向轮,方便電(diàn)脑桌移动和固定。2寸双轴承结构,直径50mm,轮宽25mm,高度75mm,螺杆M10*25。
尺寸:600mm*560mm*1000mm(桌面离地800mm)。
·实训项目
1.PLC技术实训2.传感器技术实训
3.机器人驱动控制系统设计、安装、接線(xiàn)及调试
4.机器人往返运动控制
5.机器人搬运控制
6.机器人多(duō)点定位控制
7.机器人多(duō)点搬运循环控制
