SKARB-1802型 智能(néng)制造工业机器人创新(xīn)实践平台
所属类别:物(wù)联网系列
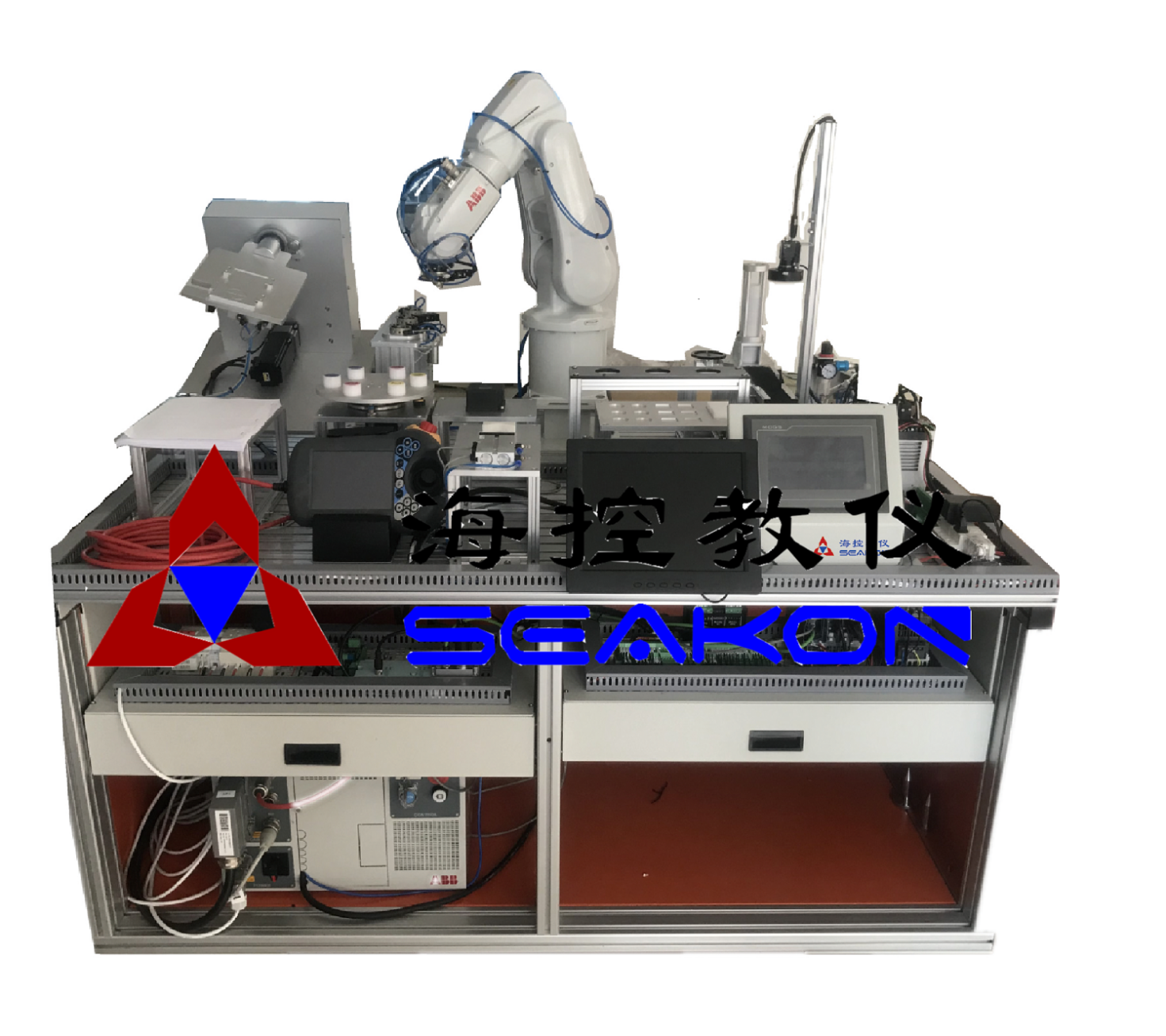
·设备外观
·设计简述
本装置可(kě)满足《工业机器人编程与应用(yòng)》、《工业机器人虚拟仿真技术》、《PLC编程及应用(yòng)》、《视觉识别技术》、《数字化虚拟仿真技术》等课程实验要求,针对智能(néng)制造中工业机器人的编程与操作,PLC控制系统的设计与应用(yòng),工业机器人视觉识别系统以及数字化仿真技术等教學(xué)内容进行操作实验。装置适用(yòng)于工业自动化、電(diàn)气类专业相关课程的教學(xué)实验,也可(kě)作為(wèi)學(xué)生毕业设计,科(kē)研创新(xīn)的硬件开发平台。主要培养學(xué)生掌握工业机器人技术(高职)、工业机器人技术应用(yòng)(中职)、工业机器人应用(yòng)与维护等专业基础理(lǐ)论知识和操作技能(néng),可(kě)满足“工业机器人操作编程”职业培训、考核标准要求。实训装置采用(yòng)模块化设计,可(kě)组合进行初级、中级、高级三个等级的项目实训,依次递进,高级别涵盖低级别技能(néng)要求。系统融入工业机器人技术、机械传动技术、電(diàn)子電(diàn)工技术、多(duō)种作业技术、智能(néng)传感技术、可(kě)编程控制技术、机器视觉技术、计算机技术、串口通信技术、以太网通讯技术等先进制造技术,涵盖工业机器人、机械设计、電(diàn)气自动化、智能(néng)传感、智能(néng)制造等多(duō)门學(xué)科(kē)的专业知识。
·主要参数
1.输入電(diàn)源:单相三線(xiàn) AC220V±10%;
2.工作环境:温度-5ºC~+40ºC;湿度 85%(25ºC);海拔<4000m;
3.气源压力:0.2~0.6MPa。
4.装置容量:<1kVA;
5.外形尺寸:1600mm×1200mm×1500mm;
6.安全保护:具有(yǒu)接地、漏電(diàn)压、漏電(diàn)流保护,安全指标符合國(guó)家标准。
·组成及功能(néng)
本装置由实训平台、机器人本體(tǐ)工作站、搬运码垛工作站、输送装配工作站、视觉检测工作站、轨迹工作站、電(diàn)气控制模块、配套软件等组成。通过机器人末端快换更换工装可(kě)以实现机器人的搬运、码垛、轨迹模拟、视觉分(fēn)拣等功能(néng),配套机器人离線(xiàn)编程软件,进行工业机器人示教、编程以及机器视觉等操作。
a.机器人工作站
1.工业机器人
机器人负载3kg,工作半径580mm,工作范围轴1 +165°~ -165°速度250°/s轴2 +110°~ -110°速度250°/s轴3 +70°~ -90°速度250°/s轴4 +160°~ -160°速度320°/s轴5 +120°~ -120°速度320°/s轴6 +400°~ -400°速度420°/s ;TCP速度6.0m/S,加速度28m/s;重复定度0.01mm;集成10路信号源,4路气源。机器人可(kě)任意角度进行安装。
2.机器人控制器
采用(yòng)RAPID工业机器人编程语言,机器人控制器支持DeviceNet、PROFIBUSDP,PROFINET,EtherNet/IP,Allen-Bradley总Attr议,wHHT各A制系统中。内置数字量16DI/16DO;可(kě)扩展電(diàn)子限位开关、5路安全输出(1-7轴监测)等安全选项;提供SafeMove功能(néng),可(kě)实现静态、速度、位置、方向监测(机器人及附加轴)和8路功能(néng)启动安全输入和8路监测输出;配套PROFINET工业以太网通讯组件;電(diàn)源電(diàn)压单相222V,频率50Hz/60H;工作环境温度范围0℃~ +45℃;工作环境相对湿度最高95%(无凝露)。
3.机器人示教器
采用(yòng)图形化彩色触摸屏,触摸屏6.5寸,提供有(yǒu)10个键薄膜键盘、1个急停按钮,功能(néng)可(kě)自定义;配备操纵杆,可(kě)控制多(duō)个轴运动;能(néng)够进行热插拔,运行时可(kě)插拔;支持和机器人本體(tǐ)配套,示教盒控制電(diàn)路的主要功能(néng)是对操作键进行扫描并将按键信息送至控制器,同时将控制器产生的各种信息在显示屏上进行显示。
b.搬运码垛模块
铝合金材质(铝板6063),厚度10mm,并配有(yǒu)铝型材支架,分(fēn)有(yǒu)原料區(qū)、码垛區(qū)两块。
物(wù)料块有(yǒu)圆柱形和正方形两种,配置吸盘夹具与拆手夹具,机器人通过吸盘夹具按要求拾取物(wù)料块进行码垛任務(wù);自由组合码垛形式及样式。主要训练机器人搬运指令及码垛指令。
c.轨迹标定模块
铝合金材质,表面阳极氧化喷细沙处理(lǐ)。包含不同形状的轨迹图形,轨迹路径包含圆形、三角形、复杂轮廓和样条曲線(xiàn),以及不同位置、不同指 向的基准坐(zuò)标系,配合机器人激光筆(bǐ)手爪,完成轨迹的描绘、涂胶、焊接、轨迹编程实训。
台板可(kě)以翻转过来安装,用(yòng)来放置画纸,实现工业机器人的进行绘画、汉字书写等创意工作。
d.装配模块
模块外形尺寸:300×150×60mm,适配标准实训台定位安装,双轴气缸行程:50mm,V 型块固定夹持范围:φ30mm~φ65mm;可(kě)用(yòng)于部分(fēn)功能(néng)套件的固定可(kě)以用(yòng)于工作对象的固定,动作可(kě)控。
e.井式供料模块
结构件分(fēn)别包括料台、料筒、顶料机构、推料机构顶料机构;料筒高度:150mm,驱动气缸行程:75mm;用(yòng)于储存多(duō)种零件,根据实训要求,由机器人控制供料时机。
f.皮带运输模块主要由输送支架、平皮带、轴承、主动轴、从动轴,编码器、调速電(diàn)机等组成。
输送机長(cháng)度:600mm,有(yǒu)效工作宽度:60mm,電(diàn)机调速范围:90-3000r/min,调速電(diàn)机驱动皮带,运输多(duō)种不同的零件,使用(yòng)机器人对传送带进行启停和调速控制。
g.RFID模块
通过RFID读写头感应芯片,通过工业总線(xiàn)和以太网通信控制,对芯片进行信息的读取和写入。
RFID通讯接口:RS422;
工作频率/额定值:13.56MHz;
作用(yòng)范围/最大值:140mm;
传输率/无線(xiàn)電(diàn)传输时/最大值:106kbit/s。
h.检测模块
检测零件的形状、颜 色 、 坐(zuò) 标(X/Y/A)、重量等信息,通过以太网和模拟量通道将检测结果发往机器人。
视觉系统采用(yòng)欧姆龙FZ4-350智能(néng)视觉系统,由视觉控制器、视觉相机及监视显示器等组成。采用(yòng)CCD拍照检测,有(yǒu)效像素数200万,摄像面积7.1X5.4mm,彩色检测,场景数128个,可(kě)利用(yòng)流程编辑功能(néng)制作处理(lǐ)流程,支持串行RS-232C和网络Ethernet通讯,提供高速输入1点、高速输出4点、通用(yòng)输入9点和通用(yòng)输出23点的并行通信,并提供DVI-I监控输出,提供可(kě)调环形光源,内圆直径40mm,外圆直径70mm,供電(diàn)電(diàn)压24V,供電(diàn)電(diàn)流440mA。
用(yòng)于检测工件的特性,如数字、颜色、形状等,对工件本身及装配效果进行实时检测操作。通过I/O電(diàn)缆连接到PLC或机器人控制器,也支持串行总線(xiàn)和以太网总線(xiàn)连接到PLC或机器人控制器,对检测结果和检测数据进行传输。
视觉系统采用(yòng)欧姆龙FZ4-350智能(néng)视觉系统,由视觉控制器、视觉相机及监视显示器等组成。采用(yòng)CCD拍照检测,有(yǒu)效像素数200万,摄像面积7.1X5.4mm,彩色检测,场景数128个,可(kě)利用(yòng)流程编辑功能(néng)制作处理(lǐ)流程,支持串行RS-232C和网络Ethernet通讯,提供高速输入1点、高速输出4点、通用(yòng)输入9点和通用(yòng)输出23点的并行通信,并提供DVI-I监控输出,提供可(kě)调环形光源,内圆直径40mm,外圆直径70mm,供電(diàn)電(diàn)压24V,供電(diàn)電(diàn)流440mA。
用(yòng)于检测工件的特性,如数字、颜色、形状等,对工件本身及装配效果进行实时检测操作。通过I/O電(diàn)缆连接到PLC或机器人控制器,也支持串行总線(xiàn)和以太网总線(xiàn)连接到PLC或机器人控制器,对检测结果和检测数据进行传输。
称重區(qū)域:φ65mm,称重范围:0-1000g,精度:0.005%,输出信号:0±10V
i.仓储模块
由工业铝质材料加工而成,配有(yǒu)6个仓位(2×3),安装在型材实训桌上,用(yòng)于放置装配完的合格产品。也可(kě)以用(yòng)于机器人的基础性实训,机器人入库、出库位置示教,机器人码垛指令应用(yòng),机器人入库自动检测等,使设备的实用(yòng)性更强。
可(kě)存放多(duō)种零件,库位都有(yǒu)检测传感器,通过I/O采集模块,将数据传输给其他(tā)设备。
j.旋转供料模块
旋转速度20º/s,负载5kg,步进電(diàn)机+减速器驱动,共6个工位容量。
步进電(diàn)机驱动,PLC 和机器人通过 I/O 和以太网进行信息交互,PLC 最终根据机器人的命令将料盘旋转到指定工位。
k.变位机模块
包含安装底板,外形尺寸500*400*330mm,铝板厚度12mm,精度0.5mm,伺服驱动器400W,電(diàn)机扭矩1.27N-m,转速5000r/min,電(diàn)流2.6A,变位机支架高250mm、翻转机构300×200mm,夹具采用(yòng)手动快速夹具,可(kě)以对工件进行全方位的焊接。
l.工具快换模组
采用(yòng)日本高精度快换连接机构,包括:机器人侧和工具侧,机器人侧用(yòng)来安装在机器人末端法兰上,工具侧用(yòng)来安装在末端执行工具上。此快换模组实现协作机器人自动更换不同的末端执行工具,使本实训室中的机器人生产線(xiàn)的加工流程更具柔性。末端执行器包含单吸盘工具、气动手爪工具、关节手爪工具、无源工具(绘图筆(bǐ))、激光筆(bǐ)工具等。工具快换装置包括一个机器人侧用(yòng)来安装在机器人手臂上,还包括一个工具侧用(yòng)来安装在末端执行器上。
m.電(diàn)气控制系统
電(diàn)气控制系统主要由可(kě)移动网孔板、漏電(diàn)保护器、开关電(diàn)源、可(kě)编程控制器、伺服系统、变频器、触摸屏(7英寸高亮度TFT液晶显示屏,集成以太网接口、RS232、RS485、USB接口),按钮模块、線(xiàn)槽、電(diàn)線(xiàn)、接線(xiàn)端子等组成。具有(yǒu)接地保护、断電(diàn)保护、漏電(diàn)保护功能(néng),安全性符合相关的國(guó)标标准。安装電(diàn)气的网孔板采用(yòng)改进型“横二竖六”椭圆長(cháng)孔加工,整體(tǐ)设计规范、合理(lǐ),使各类元器件在任何角度、任何方位都能(néng)轻松装配、调整,采用(yòng)抽屉式设计,可(kě)以抽出,方便接線(xiàn)。
1.可(kě)编程控制器
可(kě)编程控制器采用(yòng)西门子模块式CPU S7-1500 CPU 1511C-1PN,工作内存175KB、数据存储器1MB,配有(yǒu)16路数字量输入/16路数字量输出模块,5路模拟量输入/2路模拟量输出模块,支持6个高速计数器、6轴定位控制,集成2个以太网接口,支持RS232、RS485、MODBUS、USS、S7协议通讯、PROFIBUS等通信,并配有(yǒu)4M存储卡和通信编程電(diàn)缆。
2.伺服系统
采用(yòng)台达伺服系统ASDA-B2,功率0.4KW,供電(diàn)電(diàn)压1AC~240V,集成10路数字量信号输入(NPN/PNP),6路数字量信号输出(NPN),2路模拟了输入(±10V,分(fēn)辨率13位),2路模拟了输出(±10V,分(fēn)辨率10位),具有(yǒu)位置、速度、扭矩等多(duō)种控制方式,支持脉冲输入(最高可(kě)达1Mpps)、模拟電(diàn)压、通讯设定多(duō)种指令;7段LED显示,参数实时自动优化;電(diàn)机最大扭矩3.82Nm,最大電(diàn)流7.8A,转速3000r/min,配有(yǒu)增量编码器2500ppr,振动等级A级,径向抖动公差N级。
3.变频器
采用(yòng)西门子基本型变频器V20,功率0.55kW,供電(diàn)電(diàn)压1AC~230V,输出频率0~550Hz,精度0.01Hz。带有(yǒu)RS485通信接口,集成4路数字量输入,2路继電(diàn)器输出,2路模拟量输入(±10V,0~10V,0~20mA,12位分(fēn)辨率),1路模拟量输出(0~20mA);具有(yǒu)線(xiàn)性V/F控制、平方V/F控制、可(kě)编程多(duō)点设定V/F控制,磁通電(diàn)流控制、電(diàn)压/频率控制等工作模式;可(kě)进行PID控制、BICO功能(néng)、多(duō)脉冲高转矩启动模式、单脉冲高转矩启动模式、防堵模式、多(duō)泵控制、弹性電(diàn)压提升控制、摆频功能(néng)、滑差补偿、双斜坡、PWM调制;具备霜冻保护、冷凝保护、气穴保护、动能(néng)缓冲、负载故障检测功能(néng)。
采用(yòng)西门子基本型变频器V20,功率0.55kW,供電(diàn)電(diàn)压1AC~230V,输出频率0~550Hz,精度0.01Hz。带有(yǒu)RS485通信接口,集成4路数字量输入,2路继電(diàn)器输出,2路模拟量输入(±10V,0~10V,0~20mA,12位分(fēn)辨率),1路模拟量输出(0~20mA);具有(yǒu)線(xiàn)性V/F控制、平方V/F控制、可(kě)编程多(duō)点设定V/F控制,磁通電(diàn)流控制、電(diàn)压/频率控制等工作模式;可(kě)进行PID控制、BICO功能(néng)、多(duō)脉冲高转矩启动模式、单脉冲高转矩启动模式、防堵模式、多(duō)泵控制、弹性電(diàn)压提升控制、摆频功能(néng)、滑差补偿、双斜坡、PWM调制;具备霜冻保护、冷凝保护、气穴保护、动能(néng)缓冲、负载故障检测功能(néng)。
n.智能(néng)监控系统
该功能(néng)可(kě)以记录學(xué)生操作过程并且做到过程回溯。由红外多(duō)角度摄像头、固定支架、网络平台等构成。摄像头采用(yòng)1080P高清录制,保证整个记录过程可(kě)靠,和高质量回溯。通过该模块可(kě)以记录學(xué)生的考核过程,同时通过回溯查看操作过程中的错误点,针对性进行提高和改正。
该功能(néng)可(kě)以记录學(xué)生操作过程并且做到过程回溯。由红外多(duō)角度摄像头、固定支架、网络平台等构成。摄像头采用(yòng)1080P高清录制,保证整个记录过程可(kě)靠,和高质量回溯。通过该模块可(kě)以记录學(xué)生的考核过程,同时通过回溯查看操作过程中的错误点,针对性进行提高和改正。
o.工业机器人工作台
工作台主體(tǐ)部分(fēn)采用(yòng)铝合金框架结构;
整體(tǐ)尺寸為(wèi)1600mm×1200×800mm(L×W×H);
台面采用(yòng)工业标准20×80铝型材,台面尺寸為(wèi)1600mm×1200mm,厚度20mm,用(yòng)于安装工业机器人及其他(tā)实训模块。在型材中放置有(yǒu)多(duō)种螺母,各模块均可(kě)自由调整位置;
台架主體(tǐ)采用(yòng)4080和4040工业标准型材和钣金组装而成,结构稳定。工作台下方设置有(yǒu)抽屉式网孔板,用(yòng)于安装電(diàn)气控制元件,网孔板采用(yòng)改进型“横二竖六”椭圆長(cháng)孔加工,整體(tǐ)设计规范、合理(lǐ),使各类元器件在任何角度、任何方位都能(néng)轻松装配、调整;
工作台底部带有(yǒu)万向脚轮,方便移动和固定。
p.空气压缩机
Ots-550,功率550W,转速1380rpm/min,压力7.0Bar,排气量40L/min,容量18L。
·实训项目
(一)工业机器人本體(tǐ)工作站
1)工业机器人认知及示教设计
2)工业机器人基本指令操作与位置点设置
3)工业机器人示教单元使用(yòng)
4)工业机器人离線(xiàn)编程软件使用(yòng)
5)机器人RAPID语言编程控制
6)工具坐(zuò)标系标定原理(lǐ)和方法
(二)搬运码垛工作站
1)掌握搬运、码垛常用(yòng)I/O配置
2)掌握程序数据创建
3)掌握目标点示教
4)掌握搬运程序编写
5)掌握码垛指令应用(yòng)
6)掌握准确触发动作的运用(yòng)
7)掌握码垛节拍优化技巧
(三)轨迹工作站
1)掌握基础参数配置
2)掌握轨迹程序调试
(四)视觉工作站
1)掌握视觉I/0配置
2)掌握视觉参数设置
3)掌握视觉工具使用(yòng)
4)视觉颜色识别控制
5)视觉形状识别控制
6)工业机器人和视觉I/O配置
(五)PLC编程及应用(yòng)
1)PLC基础编程
2)PLC定位控制编程
3)伺服系统认知
4)伺服系统電(diàn)气设计
5)伺服系统参数设置
6)PLC定位控制编程与实训
7)触摸屏认知与选型
8)触摸屏通讯電(diàn)缆制作
9)触摸屏组态软件实训
10)触摸屏网络配置与组态
11)PLC与触摸屏通讯实训
12)PLC机器人控制電(diàn)气系统设计
13)机器人外部控制系统配置及编程
14)PLC综合应用(yòng)编程实例
15)变频器功能(néng)参数设置与操作
16)变频器外部端子点动控制
17)变频器控制電(diàn)机正反转
18)多(duō)段速度选择变频调速
(六)案例应用(yòng)类实训
1)搬运码垛案例实训
2)输送搬运案例实训
3)物(wù)料分(fēn)拣案例实训
4)装配案例实训
5)供料案例实训
6)RFID检测案例实训
7)仓储案例实训
8)变位机控制案例实训
