SKARB-2401型 焊接机器人编程与维护实训工作站(中级)
所属类别:机器人系列
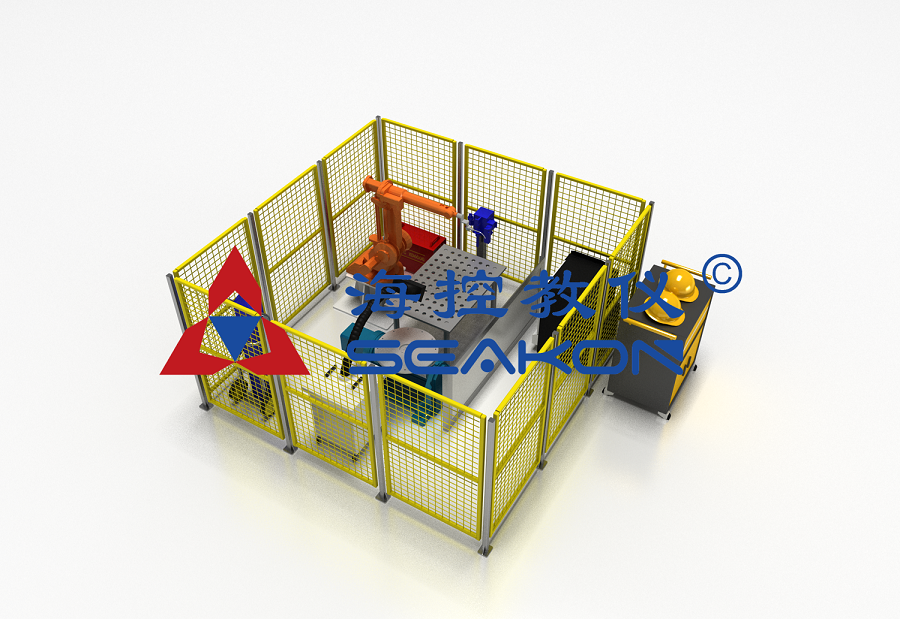
·设备外观
·设计简述
工作站以符合《焊接机器人编程与维护职业技能(néng)等级标准》考核内容為(wèi)设计标准,采用(yòng)模块化配置。主要包括:焊接机器人单元、机器人安装单元、電(diàn)弧跟踪单元、焊接電(diàn)源单元、送丝机及焊枪单元、焊枪防撞单元、清枪剪丝单元、柔性工作台单元、焊接夹具单元、双轴变位机单元、挡弧光单元、烟雾净化单元、焊接工件单元、编程學(xué)习板/TCP单元、气體(tǐ)装置单元、安全防护单元、实训工具单元等。·主要参数
1、工作電(diàn)源:三相四線(xiàn) AC380V±10% 50Hz;
2、装置容量:<18kVA;
3、实训装置尺寸:3000mm×3000mm×1500mm;(围栏)
4、安全保护:具有(yǒu)接地、漏電(diàn)压、漏電(diàn)流保护,安全指标符合國(guó)家标准。
·组成及功能(néng)
工作站主要由焊接机器人单元、机器人安装单元、電(diàn)弧跟踪单元、焊接電(diàn)源单元、送丝机及焊枪单元、焊枪防撞单元、清枪剪丝单元、柔性工作台单元、焊接夹具单元、双轴变位机单元、挡弧光单元、烟雾净化单元、焊接工件单元、编程學(xué)习板/TCP单元、气體(tǐ)装置单元、安全防护单元、实训工具单元等组成。·实训项目
1)能(néng)正确完成焊接机器人系统各部分(fēn)的安装。
2)能(néng)正确完成焊接机器人系统中的机器人与焊机、焊机与焊枪、焊机与供气装置、焊接工装、安全防护等硬件的连接。
3)能(néng)正确完成机器人与焊机、控制系统、周边设备的软件连接。
4)能(néng)正确完成焊接参数设置、工装位置设置。
5)能(néng)正确使用(yòng)功能(néng)健钮与使能(néng)按钮。
6)能(néng)设置示教盒语言与参数。
7)能(néng)手动操作工业机器人的单轴运动、線(xiàn)性运动。
8)能(néng)设定工业机器人运动速度并能(néng)切换手动操作运动模式。
9)能(néng)建立工业机器人工具、工件等坐(zuò)标系,并测试其准确性。
10)能(néng)设置工业机器人工具数据和负载数据。
11)能(néng)查看工业机器人信息提示和事件日志(zhì)。
12)熟知机器人焊接方法选择。
13)熟知焊接机器人参数的用(yòng)途和指令。
14)熟知机器人、焊机及周边设备的通讯指令。
15)熟知焊接工件的最佳焊接位姿。
16)能(néng)对机器人焊接时工具坐(zuò)标系的三点标定。
17)能(néng)对机器人焊接时工件坐(zuò)标系设定。
18)能(néng)新(xīn)建机器人焊接程序。
19)能(néng)示教机器人焊接程序。
20)能(néng)自动运行机器人焊接程序。
21)能(néng)设定和选择焊接参数。
22)能(néng)备份工业机器人程序。
23)能(néng)备份工业机器人数据。
24)能(néng)备份焊接工艺程序。
25)能(néng)恢复焊接机器人程序和数据。
26)能(néng)复制相同焊接机器人程序人数据。
27)能(néng)加载焊接机器人程序。
28)能(néng)根据操作手册的要求,进行工业机器人系统数据的定期备份。
29)能(néng)对工业机器人本體(tǐ)、控制柜、末端执行器和周边设备进行除尘清洁。
30)能(néng)对工业机器人系统線(xiàn)缆、气管进行清洁和整理(lǐ)。
31)能(néng)进行机器人的原点位姿恢复操作。
32)能(néng)根据安全生产要求填写工业机器人系统维护保养记录。
33)能(néng)够对焊机、焊枪、送丝机正确清理(lǐ)。
34)能(néng)够连接電(diàn)缆的日常检查保养。
35)能(néng)够填写日常维护保养报告。
36)能(néng)够定期对清枪站进行表面清理(lǐ)和注油。
37)能(néng)够定期对三维柔性台进行日常维护与保养。
38)能(néng)够对气管、气瓶进行日常测试。
39)能(néng)够填写周边日常维护报告。
40)能(néng)够对机器人本體(tǐ)、控制柜、进行定期检查并及时处理(lǐ)存在的隐患。
41)能(néng)够对焊接電(diàn)源、焊枪、送丝机等进行检查并及时处理(lǐ)存在的隐患;能(néng)按照规范制作定期维护保养日志(zhì)。
42)能(néng)够理(lǐ)解焊接工艺规范
43)能(néng)够正确选择焊接气體(tǐ)及焊材
44)能(néng)够确定初期工艺参数
45)能(néng)正确完成焊接机器人变位机線(xiàn)路连接。
46)能(néng)完成变位机调试
47)能(néng)完成变位机运行程序编写
48)能(néng)正确完成机器人与变位机协调运行。
49)能(néng)正确选择寻位方式
50)能(néng)正确完成電(diàn)弧跟踪程序编写
51)能(néng)正确完成電(diàn)弧跟踪参数设置
52)能(néng)运行并修正電(diàn)弧跟踪程序
53)能(néng)正确设置多(duō)层多(duō)道焊接功能(néng)
54)能(néng)完成不含跟踪的多(duō)层多(duō)焊接程序
55)能(néng)完成包含跟踪的多(duō)层多(duō)道焊接功能(néng)
56)能(néng)优化程序运行路径
57)对焊接成品外观进行检测
58)对焊接成品强度进行检测
59)能(néng)够对焊接缺陷进行分(fēn)析处理(lǐ)
60)能(néng)够更换焊接耗材
61)能(néng)够预判潜在故障
62)能(néng)够消除程序报警
63)能(néng)调试工作站协调运行。
