SKIMA-15型 智能(néng)制造实训系统-医药化工
所属类别:智能(néng)制造系列
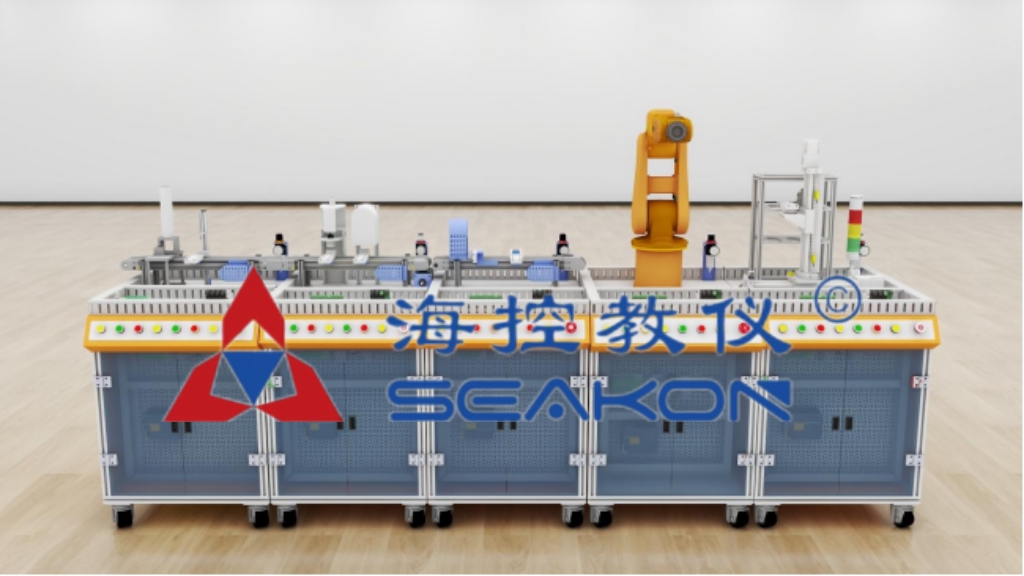
·设备外观
·设计简述
实训系统主要由上料站、加盖拧盖站、检测分(fēn)拣站、六轴机器人搬运站、立體(tǐ)仓库站等组成。本系统主要由“工作站”形式综合體(tǐ)现,“工作站”以模块方式自由组合,形成多(duō)种模式,操作者不但在实习、工作中培养、训练了机械装调、電(diàn)气管路连接、程序设计、工业机器人应用(yòng)、传感器应用(yòng)、计算机应用(yòng)、检修排故、触摸屏组态、伺服、步进驱动控制等机電(diàn)专业技能(néng),同时也可(kě)以體(tǐ)验到职业素养中的社会能(néng)力与方法能(néng)力。·主要参数
1、工作電(diàn)源:单相三線(xiàn)AC220V±10% 50Hz2、工作环境:温度-10℃~+40℃ 相对湿度<85%(25℃) 海拔<4000m
3、装置容量:≤3.0KVA;
4、整机尺寸:3000mm×800mm×1500mm ;单站:约600mm×860mm×1400mm;
5、安全保护:具有(yǒu)漏電(diàn)保护、过载保护、安全性符合國(guó)家标准。
·组成及功能(néng)
每个独立的站由实训桌、执行机构及挂板构成。每套设备除配独立的站外,还配電(diàn)脑桌等。实训桌:实训桌主體(tǐ)由型材框架、型材桌面板、封板、操作面板、自吸合门、多(duō)功能(néng)网孔板和万向轮等组装而成。
其中框架采用(yòng)3030型工业型材组成搭接而成,外侧配有(yǒu)橙色衬条装饰;型材桌面板采用(yòng)工业标准2080铝型材并通过1.5mm冷轧钢板组装而成,内置专用(yòng)螺母,可(kě)自由固定各种机械机构,固定方式≥200种,可(kě)以完成更多(duō)的实训操作;封板采用(yòng)≥1.2mm冷轧钢板制作,橘红色喷塑处理(lǐ);
桌前设有(yǒu)控制面板,按钮面板采用(yòng)≥1.2mm冷轧钢板橘色喷塑处理(lǐ),且呈50°斜角,符合人體(tǐ)工程學(xué),方便操作;面板安装有(yǒu)启动、停止、复位、急停按钮,用(yòng)于进行工作站各项控制功能(néng)。
实训桌正面下方设有(yǒu)自吸合活动门,采用(yòng)铝合金高强度合页固定,配有(yǒu)深棕色有(yǒu)机玻璃观察窗,设备维护方便。
实训桌内部设有(yǒu)多(duō)功能(néng)网孔板机构,网孔采用(yòng)5mm椭圆長(cháng)孔,整體(tǐ)设计规范、合理(lǐ),電(diàn)气元器件在任何角度、任何方位都能(néng)轻松装配、调整。
实训桌底部安装有(yǒu)4个高强度带刹車(chē)万向轮方便实训装置的移动和固定。
执行机构:采用(yòng)铝板精加工后组装而成,表面喷砂后阳极氧化,既防腐蚀又(yòu)美观大方。
挂板:采用(yòng)1.5mm冷轧钢板焊接而成,网孔板采用(yòng)5mm椭圆長(cháng)孔加工,整體(tǐ)设计规范、合理(lǐ),電(diàn)气元器件在任何角度、任何方位都能(néng)轻松装配、调整。斜装于实训桌正下方,可(kě)很(hěn)方便地取、卸。挂板上装有(yǒu)PLC、变频器等電(diàn)器元件,统一由電(diàn)缆線(xiàn)及快速插头与实训桌上的执行机构连接。
電(diàn)脑桌:
主體(tǐ)部分(fēn)采用(yòng)工业标准铝型材(规格30×30)组装而成,封板采用(yòng)1.5mm冷轧钢板喷塑处理(lǐ);
桌面上方设置有(yǒu)显示器围栏,采用(yòng)1.5mm冷轧钢板冲φ6.5mm工艺孔,既美观又(yòu)实用(yòng),防止显示器坠落;
键盘铁质材料加工喷塑而成,通过加重型轴承导轨吊装在桌面板下方,抽出缩回自如;
桌體(tǐ)配有(yǒu)4个带刹車(chē)万向轮,方便電(diàn)脑桌移动和固定。
尺寸:600*500*1000mm(桌面离地800mm)
·实训项目
(一)PLC基础任務(wù)实训1、PLC定时器元件应用(yòng);
2、PLC计数器元件应用(yòng);
3、PLC高速脉冲输入及相关特殊功能(néng)元件应用(yòng);
4、PLC 以太网网络通讯令及相关特殊功能(néng)元件应用(yòng)。
(二)机械装调基础实训
1、机械图样识读;
2、装配前、后零件及设备的检测;
3、装配的划線(xiàn)、找正;
4、轴瓦等配合面的锉削、刮削;
5、典型零、部件的装配与调试;
6、气动元件的装配、调试与管路连接;
7、電(diàn)机、轴承、挡圈、连轴器、同步轮、同步带、平带、传感器的装配与调试;
8、轴承、蜗轮、蜗杆、滚珠丝杠的润滑。
(三)触摸屏
1、触摸屏的工程创建、编辑与下载操作;
2、触摸屏的离線(xiàn)模拟应用(yòng);
3、触摸屏的在線(xiàn)模拟应用(yòng);
4、触摸屏的输入输出位元件应用(yòng);
5、触摸屏的输入输出字元件应用(yòng);
6、触摸屏的XY曲線(xiàn)图形元件应用(yòng);
7、触摸屏的动画元件应用(yòng);
8、触摸屏的数值、文(wén)本输入显示元件应用(yòng);
9、触摸屏的报警信息、事件登录等元件的应用(yòng);
10、触摸屏的定时器等元件的应用(yòng);
11、触摸屏的系统综合应用(yòng)。
(四)上料单元
1、光電(diàn)传感器的接線(xiàn)与调试;
2、直流電(diàn)机的接線(xiàn)与调试;
3、双联气缸的安装和气量调节与磁性开关的接線(xiàn)和位置调整;
4、基于皮带输送机构的机械安装与调试;
5、基于灌装机构的机械安装与调试;
6、基于上料灌装单元控制挂板的電(diàn)气安装与调试;
7、基于上料灌装单元模型综合安装、接線(xiàn)与调试;
8、基于PLC的皮带上料机构运行控制;
9、基于PLC的灌装机构运行控制;
10、基于PLC的上料灌装单元综合运行控制。
(五)加盖拧盖单元
1、光電(diàn)传感器的接線(xiàn)与调试;
2、直流電(diàn)机的接線(xiàn)与调试;
3、筆(bǐ)型气缸的安装和气量调节与磁性开关的接線(xiàn)和位置调整;
4、双联气缸的安装和气量调节与磁性开关的接線(xiàn)和位置调整;
5、基于皮带输送机构的机械安装与调试;
6、基于加盖机构的机械安装与调试;
7、基于拧盖机构的机械安装与调试;
8、基于加盖拧盖单元控制挂板的電(diàn)气安装与调试;
9、基于加盖拧盖单元模型综合安装、接線(xiàn)与调试;
10、基于PLC的加盖机构运行控制;
11、基于PLC的拧盖机构运行控制;
12、基于PLC的加盖拧盖单元综合运行控制;
(六)检测分(fēn)拣单元
1、光電(diàn)传感器的接線(xiàn)与调试;
2、光纤传感器的接線(xiàn)与调试;
3、测水传感器的接線(xiàn)与调试;
4、直流電(diàn)机的接線(xiàn)与调试;
5、双联气缸的安装和气量调节与磁性开关的接線(xiàn)和位置调整;
6、基于皮带输送机构的机械安装与调试;
7、基于检测分(fēn)拣单元控制挂板的電(diàn)气安装与调试;
8、基于检测分(fēn)拣单元模型综合安装、接線(xiàn)与调试;
9、基于PLC的检测分(fēn)拣单元综合运行控制;
(七)6轴机器人搬运单元
1、光電(diàn)传感器的接線(xiàn)与调试;
2、行程开关的接線(xiàn)与调试;
3、步进電(diàn)机的接線(xiàn)与调试;
4、双联气缸的安装和气量调节与磁性开关的接線(xiàn)和位置调整;
5、基于步进升降机构的机械安装与调试;
6、基于机器人夹具的机械安装与调试;
7、6轴机器人的组成应用(yòng);
8、轴机器人的初始化应用(yòng)操作;
9、6轴机器人的编程/仿真软件应用(yòng)操作;
10、6轴机器人的示教单元应用(yòng)操作;
11、6轴机器人控制器应用(yòng)操作;
12、6轴机器人的应用(yòng)编程;
13、6轴机器人的IO通讯应用(yòng)设计;
14、轴机器人的安全操作应用(yòng)设计;
15、6轴机器人的综合应用(yòng)设计;
16、基于PLC的步进升降机构运行控制;
17、基于PLC的6轴机器人物(wù)料瓶子吸取放置应用(yòng)控制;
18、基于PLC的6轴机器人搬运单元综合运行控制;
(八)立體(tǐ)仓库单元
1、光電(diàn)传感器的接線(xiàn)与调试;
2、行程开关的接線(xiàn)与调试;
3、气动吸盘安装与应用(yòng);
4、双联气缸的安装和气量调节与磁性开关的接線(xiàn)和位置调整;
5、伺服驱动器的限位保护参数设置;
6、伺服驱动器的電(diàn)子齿轮比参数设备;
7、伺服驱动器的位置模式运行控制;
8、伺服電(diàn)机的力矩模式运行控制;
9、伺服電(diàn)机的速度模式运行控制;
10、基于PLC 脉冲指令的运行控制;
11、基于PLC的水平轴定位运行控制;
12、基于PLC的垂直轴定位运行控制;
13、基于PLC立體(tǐ)仓库综合运行控制;
