SKIMA-10型 汽車(chē)输送線(xiàn)实训系统
所属类别:智能(néng)制造系列
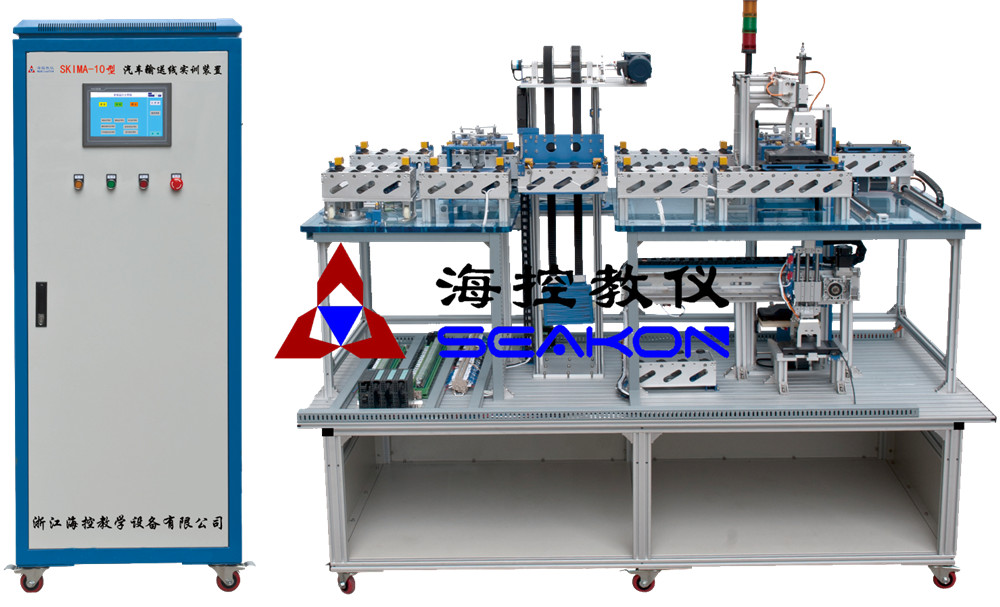
·设备外观
·设计简述
汽車(chē)输送線(xiàn)是整个汽車(chē)生产工艺中最主要的设备之一,是冲压、焊装、涂装、总装等汽車(chē)生产線(xiàn)中物(wù)流输送设备。本系统以汽車(chē)制造业中物(wù)流输送设备為(wèi)基础,结合我國(guó)目前最先进的汽車(chē)生产線(xiàn)技术研制而成。可(kě)完成各工位之间的链接输送、汽車(chē)零部件的搬运输送和生产节拍的管理(lǐ)。各站间通过可(kě)编程控制器进行数据交换,在PLC的控制下实现相关的互锁、数据传送等操作,系统中的上位机使用(yòng)工控组态监控软件,对现场设备生产状况进行动态实时监控,实现加工生产数据可(kě)视化。该系统有(yǒu)单机、联机二种工作方式,方便教學(xué)和实训。·主要参数
1.工作電(diàn)源:三相四線(xiàn)AC380V±10% 50Hz;2.工作环境:温度-10℃~+40℃ 相对湿度<85%(25℃) 海拔<4000m;
3.装置容量:<1.5kVA;
4.整机尺寸:2260mm×1040mm×1700m;
5.安全保护:具有(yǒu)漏電(diàn)保护、过载保护、安全性符合國(guó)家标准。
·组成及功能(néng)
系统主要由工作台(型材结构,双层桌面)、上料站、滑撬输送机站、随行升降转载机站、滑橇专载升降机站、滑撬转向机站、滑撬堆/解垛机站、四自由度搬运机械手站、AGV自动导引运输車(chē)组成。1.上料站
由光電(diàn)传感器、工业铝型材、钣金结构件、机械零部件等组成。本站的功能(néng)是对汽車(chē)模型有(yǒu)无进行检测并记数。
2.滑撬输送机站
由单相交流减速電(diàn)机及启动電(diàn)容、電(diàn)感传感器、继電(diàn)器、同步带/轮传动机构、转动轴承、工业铝型材、钣金结构件、机械零部件等组成。本站的功能(néng)是滑撬检测输送。
3.随行升降转载机站
由交流伺服電(diàn)机及驱动器(功率:400W)、两相步进電(diàn)机及驱动器、涡轮蜗杆减速传动机构、齿轮齿条传动机构、滚珠丝杠传动机构、双导杆平行气夹、传感器、机械零部件等组成。本站的功能(néng)是汽車(chē)模型的提升输送,将車(chē)身安放于滑撬上。
4.滑橇专载升降机站
由变频器、带刹車(chē)交流减速電(diàn)机、单相交流電(diàn)机、继電(diàn)器、光電(diàn)编码器、同步带/轮传动机构、滚轮导轨机构、配重、升降平台输送辊床、机械零部件等组成。本站的功能(néng)是完成将升降平台输送辊床的汽車(chē)模型提升到一定的高度后将汽車(chē)模型送出。
5.滑撬转向机站
由交流减速電(diàn)机、继電(diàn)器、電(diàn)感传感器、滚轮导轨、输送辊床、钣金结构件、机械零部件等组成。本站的功能(néng)是将堆垛系统送出的滑撬,进行角度旋转、输送,方便流水線(xiàn)的自动运行。
6.滑撬堆/解垛机站
由两相四線(xiàn)步进電(diàn)机及驱动器、直流减速電(diàn)机、交流减速電(diàn)机、直線(xiàn)位移传感器、電(diàn)感传感器、光電(diàn)传感器、限位开关、滚珠丝杠、直線(xiàn)导轨/滑块、连杆机构、输送辊床、机械零部件等组成。本站的功能(néng)是将滑撬在堆垛站进行堆垛及在解垛站进行分(fēn)解,具备滑撬的存储和依次送出功能(néng)。
7.四自由度搬运机械手站
由无杆气缸、带导杆气缸、重型导杆气缸、双联气缸、双导杆平行气夹、暂存货道、光電(diàn)传感器、磁性传感器、调速接头、单控電(diàn)磁阀、双控電(diàn)磁阀、调压过滤器、机械零部件等组成。本站的功能(néng)是将循迹搬运車(chē)送来的滑撬上面的汽車(chē)模型,抓取、提升、运输、搬运至暂存货道。
8.AGV自动导引运输車(chē)
AGV自动导引运输車(chē)配备有(yǒu)電(diàn)磁自动导引装置,能(néng)够沿规定的导引路径行驶,具有(yǒu)安全保护以及各种移载功能(néng)的运输車(chē),属于轮式移动机器人的范畴。本装置配备的AGV小(xiǎo)車(chē)采用(yòng)二轮驱动方式、双向机构、双头寻迹传感器,可(kě)以正反方向寻迹运动;AGV小(xiǎo)車(chē)上带有(yǒu)传动带机构,实现物(wù)料的装载功能(néng);带有(yǒu)导向槽机构,可(kě)以实现准确的定位功能(néng);采用(yòng)无線(xiàn)通信模块,实现AGV和PLC无線(xiàn)网络通信。
主要完成将滚床传输線(xiàn)的滑撬传输到堆垛解垛站。
·实训项目
1.三相交流异步電(diàn)机变频调速应用(yòng)与控制2.步进電(diàn)机程序控制
3.交流伺服電(diàn)机控制電(diàn)路的连接与程序控制
4.气动控制回路安装与调试
5.机械结构安装与调整
6.滑撬输送机的程序控制
7.随行升降转载机的程序控制
8.滑橇专载升降机的程序控制
9.滑撬转向机的程序控制
10.滑撬堆/解垛机的程序控制
11.四自由度搬运机械手的程序控制
12.AGV自动导引运输車(chē)控制与调试
13.组态监控及人机界面技术应用(yòng)
14.汽車(chē)输送線(xiàn)系统调试与运行
15.汽車(chē)输送線(xiàn)的故障检测与维修
