所属类别:机電(diàn)一體(tǐ)化系列
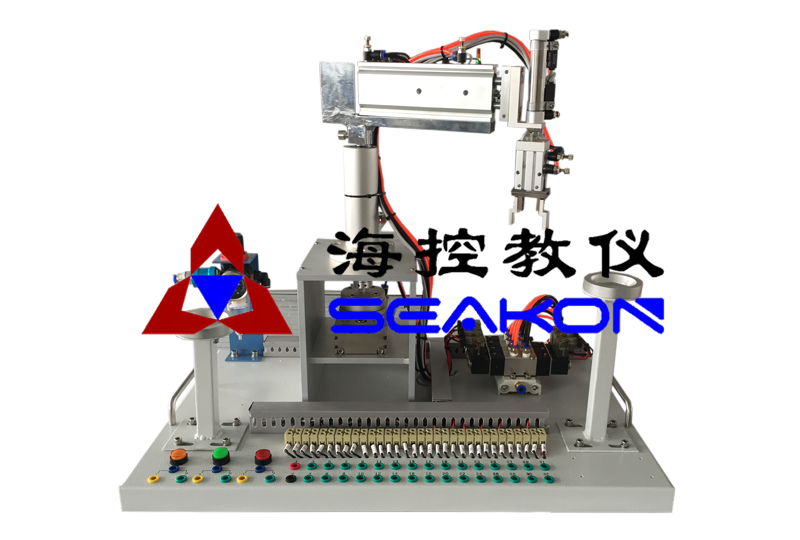
·设备外观
·设计简述
实训模型是一套完整的气动机械手搬运装置,由安装底板、气动手指、单杆提升气缸、双导杆伸缩气缸、旋转摆动气缸、多(duō)种类型磁性传感器、多(duō)种类型電(diàn)磁阀、空气过滤器、气源控制滑阀及接線(xiàn)端子排及各种電(diàn)气控制元件等组成。主要完成物(wù)料的搬运功能(néng),气动机械手通过前臂下降,气动手指夹紧物(wù)體(tǐ),手臂缩回,手臂右摆,手臂前伸,前臂下降,手爪松开将物(wù)體(tǐ)放到指定位置等动作后,机械手返回原位。将電(diàn)磁阀及磁性开关等元件的引出線(xiàn)连接到相应的端子接線(xiàn)排上,方便使用(yòng)。能(néng)满足职业院校可(kě)编程控制器、机電(diàn)一體(tǐ)化、气动技术等相关课程的实训教學(xué)。·主要参数
1.工作電(diàn)源:DC24V±5% 1A;2.工作环境:温度-10℃- +40℃ ,相对湿度<85%,海拔<4000米;
3.气源压力:0.4MPa;
4.装置容量:<0.5kVA;
5.外形尺寸:600mm×400mm×500mm。
·组成及功能(néng)
1.可(kě)与多(duō)种实训系统集成使用(yòng)。2.设备组成:实训装置主要由型机械手模型、气动执行组件、气动驱动组件、電(diàn)器控制单元、、控制按钮与指示模块、气缸、空气压缩机、传感器等组成。
3.主要功能(néng):开机复位、横轴前升、手旋转到位、電(diàn)磁阀动作手爪台开、竖轴下降、電(diàn)磁阀复位手爪夹紧、竖轴上升、横轴缩回、底盘旋转到位、横轴前伸、手爪旋转、竖轴下降、電(diàn)磁阀动作手爪台开、竖轴上升、复位。
·实训项目
1.模型自动运行(包括实训台基本操作、组成等)2.模型设计原理(lǐ)与模块认知 (主要对设计思路方向的训练)
3.气动回路识图
4.電(diàn)气原理(lǐ)图识图
5.模型气动元件装配
6.气动方向控制回路的安装
7.气动速度控制回路的安装
8.气动顺序控制回路的安装
9.气动系统气路的连接
10.磁性开关的位置调整
11.气动系统调试
12.机械手物(wù)料搬运综合控制
