SKARB-13型 工业机器人与智能(néng)视觉系统应用(yòng)实训平台(ABB-三菱)
所属类别:机器人系列
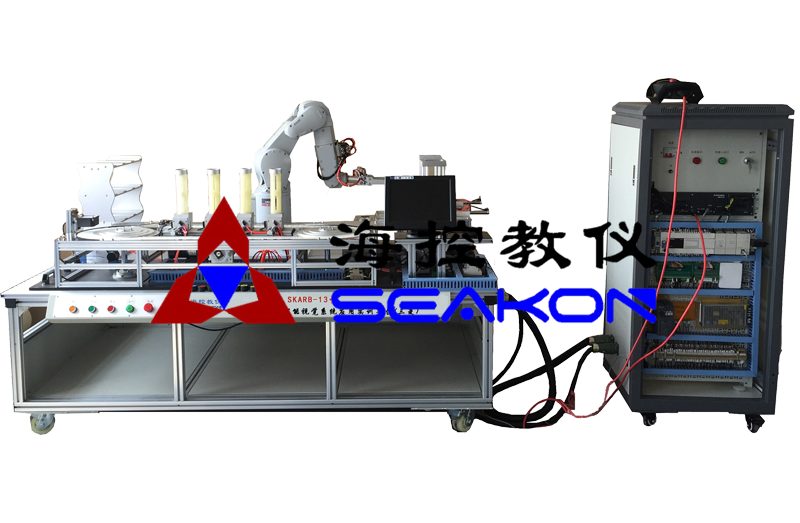
·设备外观
·设计简述
实训平台包含工业机器人单元、智能(néng)视觉检测单元、可(kě)编程控制器(PLC)单元、RFID数据传输单元、工具换装单元、四工位供料单元、环形输送单元、直線(xiàn)输送单元、工件组装单元、立體(tǐ)仓库单元、废品回收框、各类工件、電(diàn)气控制柜、型材实训桌、空气压缩机、電(diàn)脑桌等。可(kě)以实现对高速传输的工件进行检测、分(fēn)拣、搬运、组装、智能(néng)识别存储等操作(此实训平台的机器人、视觉系统和PLC有(yǒu)多(duō)种配置可(kě)供选择)。实训平台各实训模块均安装在工业标准型材桌面上,机械结构、電(diàn)气控制回路、执行机构完全独立,采用(yòng)工业标准件设计。通过此平台可(kě)以进行机械组装、電(diàn)气線(xiàn)路设计与接線(xiàn)、PLC编程与调试、智能(néng)视觉流程编辑、工业机器人编程与调试、RFID数据传输应用(yòng)等多(duō)方面训练。实训装置适合适合高等院校、职业院校、技工學(xué)校等机器人工程、工业机器人技术、机電(diàn)技术应用(yòng)(工业机器人方向)、工业机器人技术应用(yòng)、工业机器人应用(yòng)与维护等相关专业的《机器人与控制技术》、《运动控制》、《自动化技术》等课程实训教學(xué)。
·主要参数
1.工作電(diàn)源:单相三線(xiàn)AC220V±10% 50Hz;2.工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m;
3.气源压力:0.4~0.6MPa;
4.装置容量:<1.5kVA;
5.平台外形尺寸:2000mm*1200mm*1500mm;
6.控制柜尺寸:800mm*600mm*1800mm;
7.安全保护:具有(yǒu)接地、漏電(diàn)压、漏電(diàn)流保护,安全指标符合國(guó)家标准。
·组成及功能(néng)
该实训平台由工业机器人单元、智能(néng)视觉检测单元、可(kě)编程控制器(PLC)单元、RFID数据传输单元、工具换装单元、四工位供料单元、环形输送单元、直線(xiàn)输送单元、工件组装单元、立體(tǐ)仓库单元、废品回收框、各类工件、電(diàn)气控制柜、型材实训桌、空气压缩机、電(diàn)脑桌等。(一)工业机器人单元(三菱、ABB、安川三种品牌可(kě)选)
选项一:三菱机器人
三菱系统:由RV-4FL机器人本體(tǐ)、机器人控制器、示教单元、输入输出信号转接板和多(duō)功能(néng)手爪机构组成,机器人配有(yǒu)多(duō)种规格夹具、吸盘、工具等,可(kě)对工件进行抓取、吸取、搬运、装配、拆解等操作,也可(kě)以抓取智能(néng)视觉相机对工件、装配过程进行实时检测操作。
选项二:ABB机器人
ABB系统:由IRB 120六自由度工业机器人本體(tǐ)、机器人控制器、示教单元、ABB板链追踪模块、输入输出信号转接板和多(duō)功能(néng)手爪机构组成,机器人配有(yǒu)多(duō)种规格夹具、吸盘、工具等,可(kě)对工件进行抓取、吸取、搬运、装配、拆解等操作,也可(kě)以抓取智能(néng)视觉相机对工件、装配过程进行实时检测操作。
选项三:安川机器人
安川系统:由MH3F六自由度工业机器人本體(tǐ)、机器人控制器、示教单元、输入输出信号转接板和多(duō)功能(néng)手爪机构组成,机器人配有(yǒu)多(duō)种规格夹具、吸盘、工具等,可(kě)对工件进行抓取、吸取、搬运、装配、拆解等操作,也可(kě)以抓取智能(néng)视觉相机对工件、装配过程进行实时检测操作。
(二)智能(néng)视觉检测单元
视觉检测系统选用(yòng)欧姆龙FH-L550控制器和FZ-SC2M相机,有(yǒu)效像素数200万,摄像面积7.1*5.4mm,彩色检测,场景数 128 个,可(kě)利用(yòng)流程编辑功能(néng)制作处理(lǐ)流程,支持串行 RS-232C 和网络 Ethernet 通讯,提供高速输入1点、高速输出4点、通用(yòng)输入 9点和通用(yòng)输出23点的并行通信,提供 DVI-I 监控输出,提供环形光源,内圆直径 40mm,外圆直径 70mm,供電(diàn)電(diàn)压 24V,供電(diàn)電(diàn)流 440mA。
智能(néng)视觉检测系统采用(yòng)CCD照相机将被检测的目标转换成图像信号,传送给专用(yòng)的图像处理(lǐ)系统,根据像素分(fēn)布和亮度、颜色等信息,转变成数字化信号,图像处理(lǐ)系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、長(cháng)度,再根据预设的允许度和其他(tā)条件输出结果,包括尺寸、角度、个数、合格/不合格、有(yǒu)/无等,实现自动识别功能(néng)。通过I/O電(diàn)缆连接到PLC或机器人控制器,也支持串行总線(xiàn)和以太网总線(xiàn)连接到PLC或机器人控制器,对检测结果和检测数据进行传输。
(三)可(kě)编程控制器单元(三菱、西门子可(kě)选)
1、西门子单元:配备S7-1200可(kě)编程控制器、数字量扩展模块、模拟量模块、通讯模块等,用(yòng)于读写RFID系统的工件数据,控制机器人、電(diàn)机、气缸等执行机构动作,处理(lǐ)各单元检测信号、数据传输等任務(wù)。
2、三菱单元:配置FX3U-64MR可(kě)编程控制器、数字量扩展模块、模拟量模块、232串行通信模块、以太网通信模块等,用(yòng)于读写RFID系统的工件数据,控制机器人、電(diàn)机、气缸等执行机构动作,处理(lǐ)各单元检测信号,管理(lǐ)工作流程、数据传输等任務(wù)。
(四)RFID数据传输单元
采用(yòng)西门子RFID检测系统,安装在环線(xiàn)输送单元的左端圆弧处,電(diàn)子标签已埋在工件内部,检测距离為(wèi)40mm。当工件从环線(xiàn)输送单元经过左端圆弧处时,RFID检测系统可(kě)以准确地读取工件内的标签信息,如编号、颜色、高度等信息,该信息通过工业现场数据总線(xiàn)传输给PLC,用(yòng)来实现工件的分(fēn)拣操作。
(五)工具换装单元
由大口机械夹、真空发生器、吸盘工装、视觉工装、定位工装、工装支架等机构组成。大口机械夹安装机器人本體(tǐ)上,受机器人控制,大口机械夹不仅可(kě)以夹取工件,还可(kě)以夹取三种工装进行功能(néng)性操作。
大口机械夹一侧前端装有(yǒu)光纤传感器,用(yòng)于检测前方有(yǒu)无物(wù)體(tǐ),另一侧装有(yǒu)气动对接装置,用(yòng)于将气动信号自动导入到气动工装(吸盘工装)上。
吸盘工装上装有(yǒu)真空吸盘和气动对接装置,当大口机械夹夹取吸盘工装时,真空吸盘的动作由机器人控制,可(kě)以随之移动,吸取任意可(kě)到达位置内的工件。
视觉工装上装有(yǒu)视觉相机,当大口机械夹夹取视觉工装时,视觉相机可(kě)以随着机器人的移动拍摄不同位置、不同方向的工件或场景。
工装支架安装在型材实训桌上,用(yòng)于机器人自动放置和取用(yòng)不同的工装。
(六)四工位供料单元
由四套井式料库、推料气缸、顶料气缸和光電(diàn)传感器组成,安装在型材实训桌上,用(yòng)于将工件库中的工件依次推出到环形输送線(xiàn)。提供不同编号、不同高度、不同颜色的标准工件,以及编号缺少筆(bǐ)画、杂色叠加等不合格工件。四工位的供料设计,使得供料方式多(duō)样化,可(kě)以进行单一的上料,也可(kě)以进行不同编号、高度、颜色的组合上料,以及对上料速度快慢控制,实现上料形式的多(duō)样化。
(七)环形输送单元
包含一套交流调速系统,由变频器、三相交流電(diàn)机、环形齿形链(传送带)、对射传感器等组成,安装在型材实训桌上,用(yòng)于传输工件。
(八)直線(xiàn)输送单元
包含一套直流调速系统,由直流電(diàn)机、高精度编码器、直流调速控制器、同步带/轮等组成,安装在型材实训桌上,用(yòng)于传输工件。编码器信号直接接入工业机器人控制器,实现工件抓取的追踪控制;直流電(diàn)机采用(yòng)调速控制,将模拟量的電(diàn)压信号转换成電(diàn)机的速度,同时配有(yǒu)旋转编码器,也可(kě)进行電(diàn)机调速的闭环实训。
(九)工件组装单元
由工件盒上料机构及工件盖上料机构组成,采用(yòng)工业标准型材及优质铝合金材质加工而成,安装在型材实训桌平台上,用(yòng)于产品的装配。并配有(yǒu)3个工件盒组装位置及1个检测专用(yòng)位置,能(néng)同时对3个产品进行组装及检测操作。工件盒内设有(yǒu)4个工件槽用(yòng)于放置工件,工件盒和工件盖四个角带有(yǒu)磁性粘合,可(kě)以使工件盒与工件盖紧密组合在一起。设有(yǒu)電(diàn)感传感器、電(diàn)容传感器、光電(diàn)传感器,可(kě)以检测工件盒/工件盖的有(yǒu)无。机器人可(kě)以进行工件按序装配、工件拆解等操作。通过对工件盒/工件盖的正反放置,工件装配的顺序变化,提高机器人的应用(yòng)灵活性,可(kě)进行机器人不同难易程度的应用(yòng)考察,实现实训及考核的多(duō)样化。
(十)立體(tǐ)仓库单元
由工业铝质材料加工而成,配有(yǒu)9个仓位(3*3),安装在型材实训桌上,用(yòng)于放置装配完的合格产品。也可(kě)以用(yòng)于机器人的基础性实训,机器人入库、出库位置示教,机器人码垛指令应用(yòng),机器人入库自动检测等,使设备的实用(yòng)性更强。
(十一)废品回收框
安装在立體(tǐ)仓库右下方,用(yòng)于回收检测不合格的产品,由工业机器人进行自动排列放置。
(十二)電(diàn)气控制柜
主體(tǐ)部分(fēn)采用(yòng)优质钢管和钢板做骨架,经过机械加工成型,外表面喷涂彩色环氧聚塑处理(lǐ),柜體(tǐ)配有(yǒu)4个带刹車(chē)万向轮,方便移动和固定,尺寸800*600*1800mm。
控制柜四面门板均可(kě)以拆卸,方便实操器件的安装。
(十三)交换机
交换机将PLC、机器人控制器、智能(néng)视觉控制器组成一个以太网局域网,进行数据的相互传输,实现工业现场控制系统的高层次应用(yòng),同时可(kě)以培养和考核學(xué)生对工业网络的使用(yòng)技能(néng)。
(十四)气动系统
气动系统主要由空气压缩机、气源处理(lǐ)件、气动控制系统、气动执行机构、气动附件组成。
采用(yòng)奥突斯空气压缩机,供電(diàn)電(diàn)压AC220V,功率550W,工作压力0.2-0.8MPa可(kě)调。
(十五)電(diàn)脑桌
主體(tǐ)部分(fēn)采用(yòng)工业标准铝型材(规格30*30)组装而成,封板采用(yòng)1.5mm冷轧钢板喷塑处理(lǐ);
桌面上方设置有(yǒu)显示器围栏,采用(yòng)1.5mm冷轧钢板冲φ6.5mm工艺孔,既美观又(yòu)实用(yòng),防止显示器坠落;
键盘架采用(yòng)ABS塑料一次性压制而成,个性化圆角R设计避免撞伤,带有(yǒu)储物(wù)筆(bǐ)盒,通过加重型轴承导轨吊装在桌面板下方,抽出缩回自如,尺寸480*230*40mm。
桌體(tǐ)配有(yǒu)4个带刹車(chē)万向轮,方便電(diàn)脑桌移动和固定。2寸双轴承结构,直径50mm,轮宽25mm,高度75mm,螺杆M10*25。
尺寸:600mm*560mm*1000mm(桌面离地800mm)。
·实训项目
(一)实训台认知与操作类实训1.实训台自动运行(包括实训台基本操作、组成等)
2.实训台组成
3.实训台设计原理(lǐ)与模块认知 (主要对设计思路方向的训练)
4.机械原理(lǐ)图识图
5.气动回路识图
6.電(diàn)气原理(lǐ)图识图
7.实训台電(diàn)缆连接(主要对電(diàn)气方向的训练)
8.实训台气动元件装配
9.实训模块装配
10.实训台電(diàn)气装配
(二)机器人系统入门类实训
1.机器人主要技术参数
2.机器人安全系统
3.机器人安全操作规范
4.示教器认知
5.控制器认知
6.机器人本體(tǐ)认知
7.示教器画面与基本操作
8.运动模式调节
9.机器人伺服電(diàn)机上電(diàn)
10坐(zuò)标系切换
11.机器人运行速度调节
12.机器人单轴运动
13.机器人線(xiàn)性运动
14.机器人编程语言与构架
15.异常及故障处理(lǐ)技术
16.机器人维护与保养
17.机器人程序备份与加载
(三)机器人系统设置类实训
1.工具坐(zuò)标系标定原理(lǐ)和方法
2.工件/用(yòng)户坐(zuò)标系标定原理(lǐ)和方法
3.机器人I/O硬件及组成
4.机器人通信分(fēn)类与方式
5.机器人I/O配置
6.机器人零点校准
7.机器人常用(yòng)指令
8.机器人程序建立
9.机器人指令添加与编辑
10.机器人运动轨迹规划
11.机器人程序执行与测试
12.机器人自动运行
13.机器人外部启动
(四)PLC编程及应用(yòng)
1.PLC认知及选型
2.PLC電(diàn)气设计与配置
3.PLC编程与实训
4.PLC位置控制電(diàn)气设计
5.直流伺服系统认知
6.直流伺服系统電(diàn)气设计
7.直流伺服系统参数设置
8.PLC定位控制编程与实训
9.PLC与RFID通讯实训
10.PLC机器人控制電(diàn)气系统设计
11.机器人外部控制系统配置及编程
12.PLC综合应用(yòng)编程实例
(六)基于PC的工业视觉系统实训
1.基于PC的视觉系统硬件搭建
2.光源安装与调整
3.工业相机图像识别项目应用(yòng)
(八)智能(néng)工业相机应用(yòng)实训
1.智能(néng)工业相机系统构建
2.智能(néng)工业相机工程建立与测试
3.智能(néng)工业相机通讯配置及应用(yòng)
4.智能(néng)工业相机检测案例应用(yòng)
(九)RFID应用(yòng)实训
1.射频识别(RFID)技术应用(yòng)
2.使用(yòng)RFID软件读写電(diàn)子标签
3.PLC对RFID的数据读取操作
4.PLC对RFID的数据写入操作
(十)综合控制实训
1.上位机下单控制
2.基于编码器的机器人自动追踪控制
3.工件分(fēn)拣、装配、入库自动化控制
